次世代移動体・自律移動ロボットの基盤技術開発
計測&環境認識
|
|
レーザーを用いた計測技術 |
|
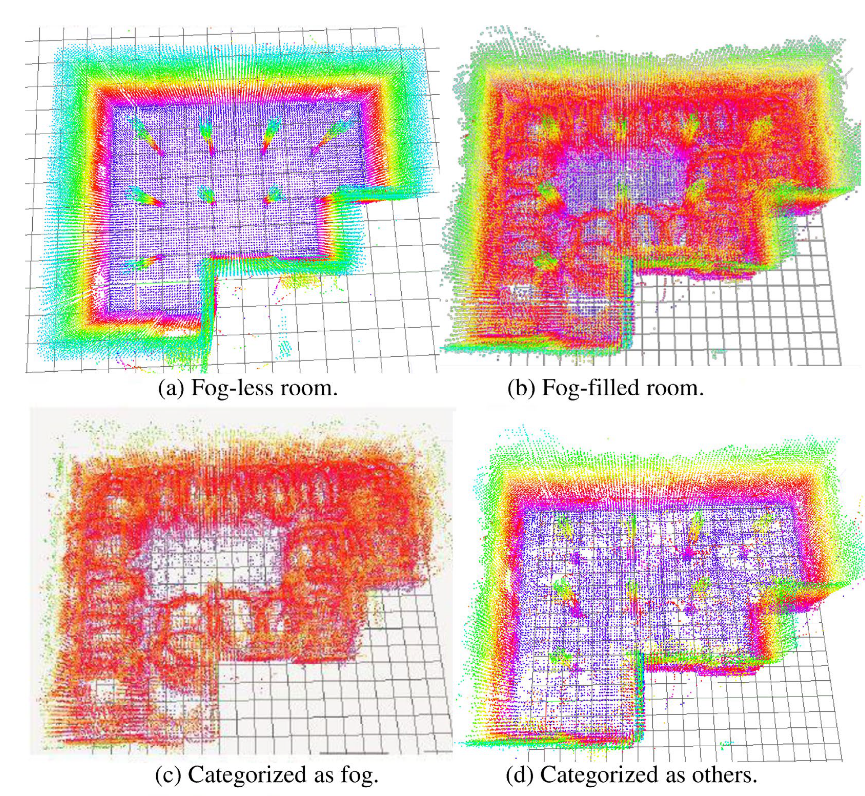
ロボットが環境を認識するために,レーザーセンサを用いた周囲の物体の3次元形状計測が行われます。しかし,原発建屋内のように霧が充満しているような湿潤な環境では,レーザーでは正しく3次元形状を計測をすることができません。霧の影響を受けない正確な3次元計測技術の確立を目指して研究を行なっています。 * Abu Ubaidah Shamsudina, Kazunori Ohno, Thomas Westfechtel, Takahiro Suzuki, Yoshito Okada, Satoshi Tadokoro, "Fog removal using laser beam penetration, laser intensity, and geometrical features for 3D measurements in fog-filled room", Advanced Robotics, 30(11-12), pp. 729--743, 2016. |

 |
放射線計測 |
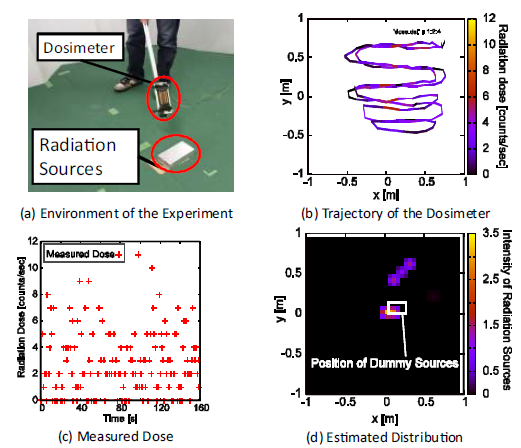
| 福島第1原発の事故によって東日本の広範囲に放射性物質が拡散し、雨樋の下や側溝など人々の生活空間に局所的に放射線量が高い場所が存在しています。除染作業を効率よくすすめるためには放射線源の位置を10cm~50cm程度の解像度でピンポイントに発見する必要があります。そこで移動ロボットや飛行ロボットを用いて3次元的に測定した空間線量から放射線の減衰特性に基づいて地物表面の放射線源分布を推定し、高密度な線源マップを作成することを目指して研究をしています。 |
行動計画
 |
未観測領域の検出と障害物回避 |
|
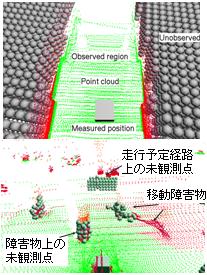
移動ロボットが障害物にぶつからずに安全かつ高速に走行するための障害物回避行動に関する研究を行っています。本研究では、障害物だけでなくセンサから見えない未観測の領域がどこにあるかを認識することで、未知の危険を予測し安全に走行することを実現しています。また、どう動けば見えていない領域を減らし障害物にぶつからず安全・高速に移動できるかを実現するための動作計画手法の研究しています。 |
位置推定
 |
3次元地図を用いたGPSによる位置推定の高精度化 |
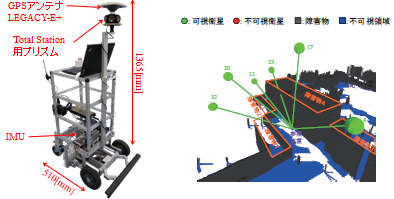
| GPS(Global Positioning System)はGPS衛星からの電波を受信することで,地球上での位置を高精度に特定できるシステムであり,カーナビや屋外での自律移動に用いられてい ます.しかしながら,都市部等建物が多い所では,建物などで電波が反射し,大きな誤差が生じることがあり,また得られたデータが誤差が大きいデータである かを判定することが困難でした.我々は3次元地図と,パーティクルフィルタによる位置推定を併用することで,得られた測位値が反射波や回折波を含んでいる かを判別することで,建物付近でも高精度な位置が可能な手法を開発しました。 |
関連ニュース
- 2023/09/18 RSJ2023受賞 当研究室の学生及び教員が, 第41回日本ロボット学会学術講演会 (RSJ2023) にて3件の賞を受賞しました. 詳細はこちら
- 2021/12/20 SI2021に参加しました 2021年12月15日~2021年12月17日に行われたSI2021にて,当研究室の教員及び学生が発表を行いました. 詳細はこちら
- 2021/06/14 ROBOMECH2021に参加しました 2021年6月6日~2021年6月8日に行われたRobomech2021にて,当研究室の教員及び学生が発表を行いました. 詳細はこちら
- 2021/04/30 RoboSoft2021に参加しました 2021年4月12日~2021年4月16日に行われたRobosoft2021にて,当研究室の学生が発表を行いました. 詳細はこちら
- 2021/04/19 田所研究室への進学希望者(学部3年生,学部4年生,他大学志望者)へ 詳細はこちら
- 2021/03/30 日本機械学会東北支部技術研究賞受賞 当研究室の教員・学生が日本機械学会東北支部技術研究賞を受賞しました. 詳細はこちら
- 2021/01/26 IROS2020受賞 当研究室の藤倉(M1)がIROS2020において,IEEE Robotics and Automation Society Japan Joint Chapter Young Awardを受賞しました 詳細はこちら
- 2021/01/26 IROS2020受賞 当研究室の藤倉(M1)がIROS2020において,SICE International Young Authors Award for IROS 2020を受賞しました. 詳細はこちら
- 2021/01/25 IROS2020に参加しました 2020年10月25日~2021年1月24日に行われたIROS2020にて,当研究室の学生が発表を行いました. &nb 詳細はこちら
- 2020/10/15 RSJ2020受賞 当研究室のThomasおよび共著者がRSJ2020において,第1回優秀研究・技術賞を受賞しました. 詳細はこちら
- 2020/06/16 ICRA2020発表 2020年5月31日~6月4日に行われたICRA2020にて,当研究室の教員および学生が発表を行いました.発表者と発表題目は以下の通りです. 詳細はこちら
- 2020/06/16 ICRA2020発表(2) ICRA2020 発表者・発表題目続き Tori Shimizu "Internally-Balanced Magnetic 詳細はこちら
- 2020/06/16 ICRA2020発表(3) ICRA2020 発表者・発表題目続き Shotaro Kojima "Wall Deadlock Evasion Control bas 詳細はこちら
- 2020/06/15 ROBOMECH2020発表 2020年5月27日(水)~30日(土)に行われたROBOMECH2020にて,当研究室の教員及び学生が発表を行いました. 詳細はこちら
- 2020/06/15 ROBOMECH2020受賞 当研究室の教員・学生がROBOMECH2020において,各種賞を受賞しました. 詳細はこちら
- 2020/01/28 SI2019受賞 当研究室の学生がSI2019(第20回計測自動制御学会システムインテグレーション部門講演会)において,賞を受賞しました. 詳細はこちら
- 2019/07/05 オープンキャンパスにて展示を行います 7月30日(火)・7月31日(水)開催のオープンキャンパスにて展示を行います。 詳細はこちら
- 2019/06/25 ROBOMECH2019にて発表をおこないました 2019年6月5日~8日に広島県で開催されたROBOMECH2019にて,当研究室のメンバーが発表を行いました. 詳細はこちら
- 2019/06/25 日本機械学会若手優秀講演フェロー賞受賞 2019年6月5日~8日に広島県で開催されたROBOMECH2019にて,当研究室のメンバーが日本機械学会若手優秀講演フェロー賞を受賞しました. 詳細はこちら
- 2019/06/14 研究室見学会開催のお知らせ 当研究室への進学を検討されている方向けに、研究室見学会を6月28日(金)に開催いたします。 詳細はこちら
- 2019/05/13 研究室見学会開催のお知らせ 当研究室への進学を検討されている方向けに、研究室見学会を5月27日(月)に開催いたします。 詳細はこちら
- 2019/04/10 SI2018優秀講演賞受賞 SI2018(2018年12月13日(木)~15日(土))における当研究室のメンバーの発表論文が優秀講演賞を受賞しました。 詳細はこちら
- 2019/03/04 田所研進学希望者の方へ 当研究室に進学を希望されている方へご連絡です. 機械系研究室公開が2019年3月13日・14日に開催されます. 詳細はこちら
- 2018/12/26 SI2018発表 2018年12月13日(木)~15日(土)に大阪工業大学で開催された第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)にて、当研究室が発表を行いました。 詳細はこちら
- 2018/07/31 オープンキャンパス2018 2018年7月31日,8月1日に東北大学でオープンキャンパスが開催されます. 工学部のオープンキャンパスについて,詳しくは下記をご覧ください. http://www.eng.tohoku.ac.jp/ 詳細はこちら
- 2018/04/19 消防ロボット開発 WEB報道 当研究室の大野准教授らが関係する消防ロボットプロジェクトについて,WEBメディアEMIRAにおいて報道されました.詳細は以下の通りです. 詳細はこちら
- 2018/04/18 自動走行デモンストレーションの取り組みの報道 大野准教授らの自動走行デモンストレーションの取り組みが,国家戦略特区情報誌仙台特区 Vol.5にて,近未来技術実証の取り組みとして紹介されました. 詳細はこちら
- 2017/10/30 次世代移動体システム実証デモ 10月25日に泉区パークタウンで次世代移動体システムの実証実験が行われ,その様子が河北新報,日経新聞,読売新聞に掲載されました. 日経新聞『仙台の産官学、住宅地で自動運転の実証実験 』 当 詳細はこちら
- 2017/10/25 新聞にOmniCrawlerが掲載されました. 当研究室の多田隈建二郎准教授の研究成果であるOmniCrawlerを実用化したロボットに関する記事が掲載されました. 以下に掲載された新聞とリンクを掲載します. 10月10日(火) 日本経済新聞WEB 詳細はこちら
- 2017/10/18 SSRR2017 10月11日~13日に,中国・上海にて開催されたSSRR2017(The 15th IEEE International Symposium on Safety, Security, and Resc 詳細はこちら