研究内容・全方向移動機構
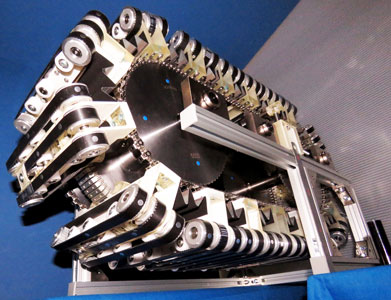
面状全方向クローラ機構 "Omni-Board"
大径履 帯 の周上に複数の小径履帯を配置して構成。
考案した二軸直交駆動用ラックチェーン機構により、大径履帯の前後駆動および小径履帯による側方駆動を2つのアクチュエータのみで実現。
受圧面積を大きく設け、荷重分散が可能な構造であるため、柔軟・脆弱不整地で高い踏破能力を発揮可能。(2010年〜)
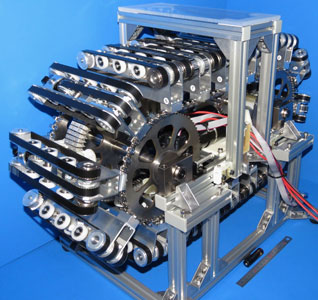
大径履 帯 の周上に複数の小径履帯を配置して構成。
考案した二軸直交駆動用ラックチェーン機構により、大径履帯の前後駆動および小径履帯による側方駆動を2つのアクチュエータのみで実現。
受圧面積を大きく設け、荷重分散が可能な構造であるため、柔軟・脆弱不整地で高い踏破能力を発揮可能。(2010年〜)