NEWS
ROBOMECH2018にて発表を行いました。
2018年6月2日-5日に福岡県北九州市で開催されたロボティクス・メカトロニクス講演会2018(ROBOMECH2018)にて、当研究室が発表を行いました。
発表者と発表題目は以下の通りです。
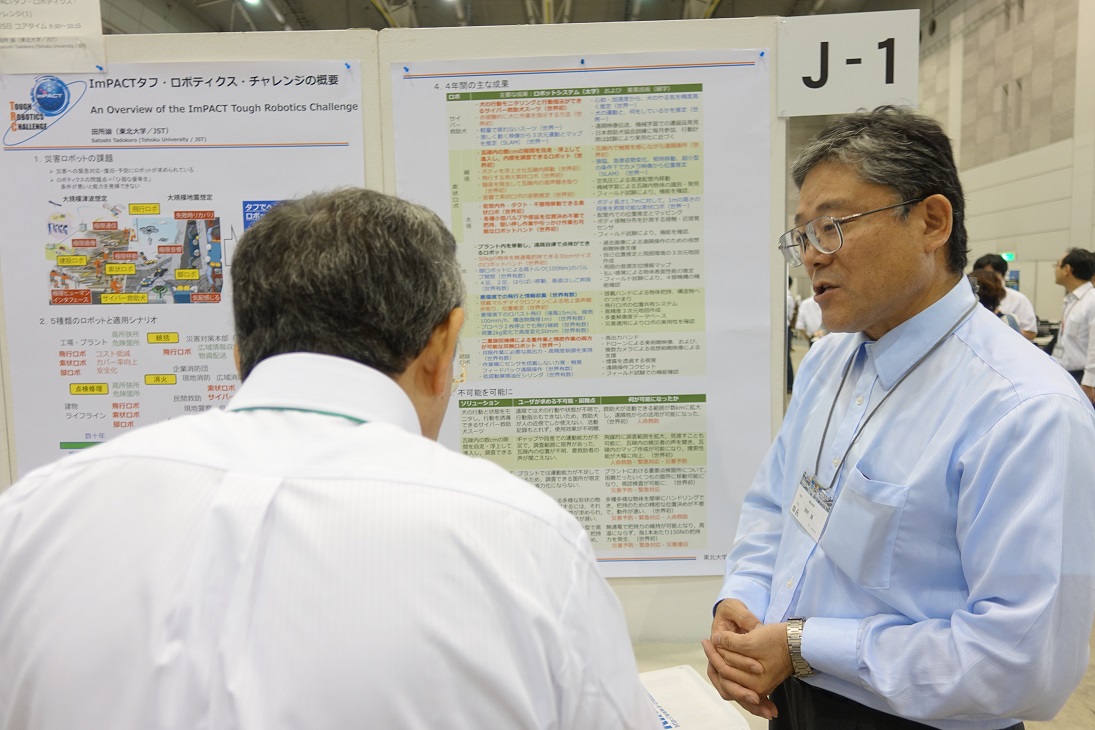
田所諭 「ImPACTタフロボティクス・チャレンジの概要」
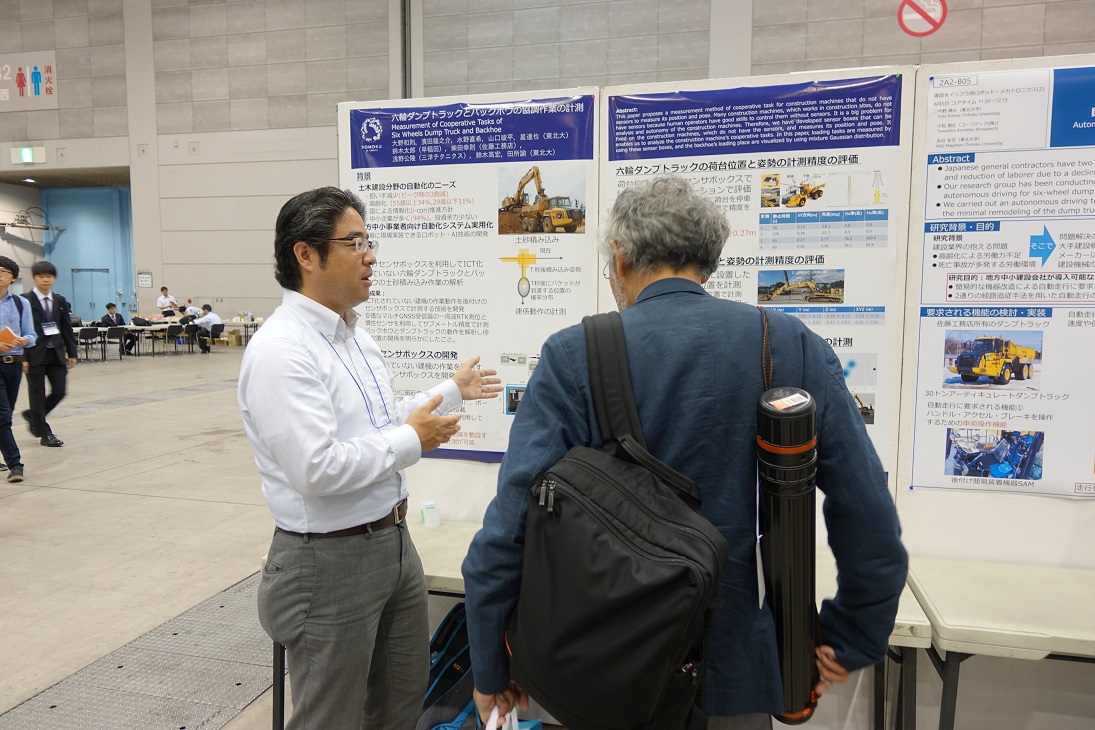
大野和則 「六輪ダンプトラックとバックホーの協調作業の計測」
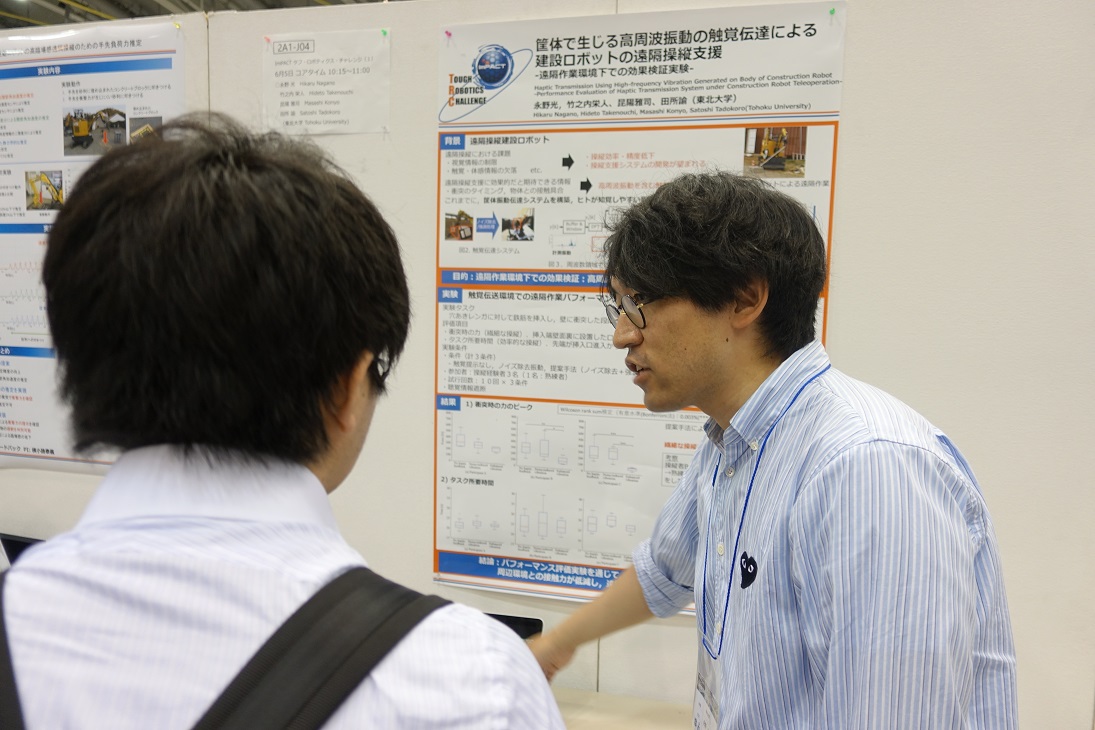
永野光 「筐体で生じる高周波振動の触覚伝達による建設ロボットの遠隔操縦支援」遠隔作業環境下での効果検証実験
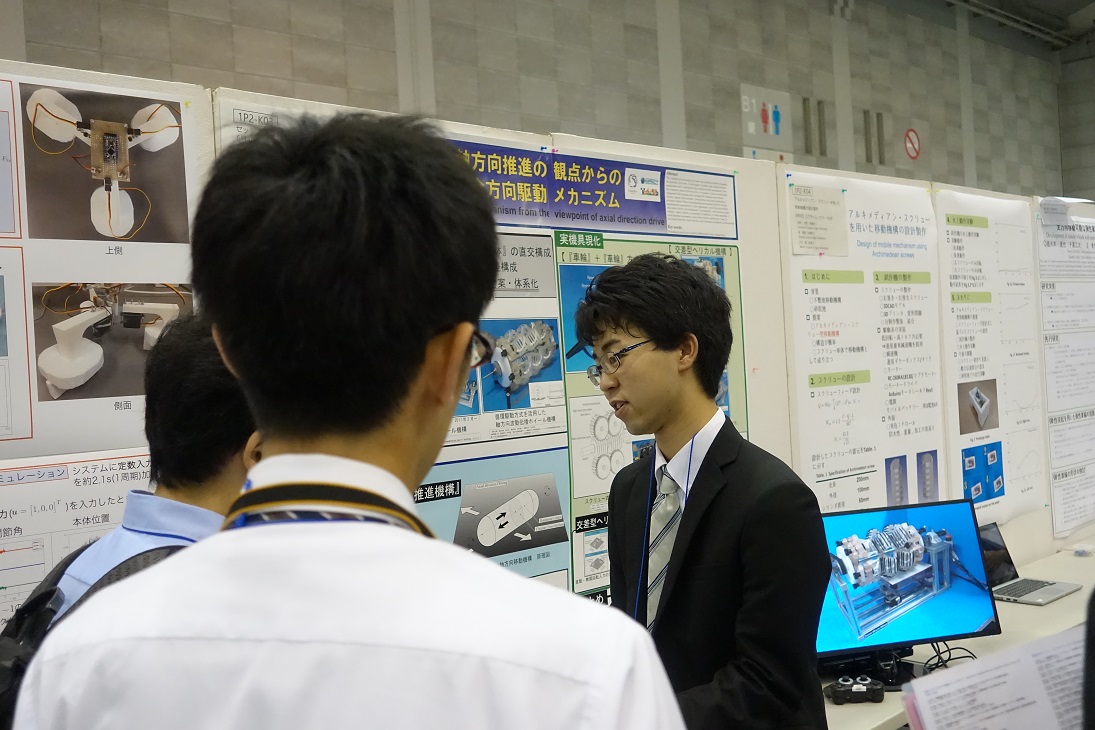
渡辺将広 「双リング式全方向車輪機構」交差型ヘリカル歯車機構によるリング状車輪の能動化
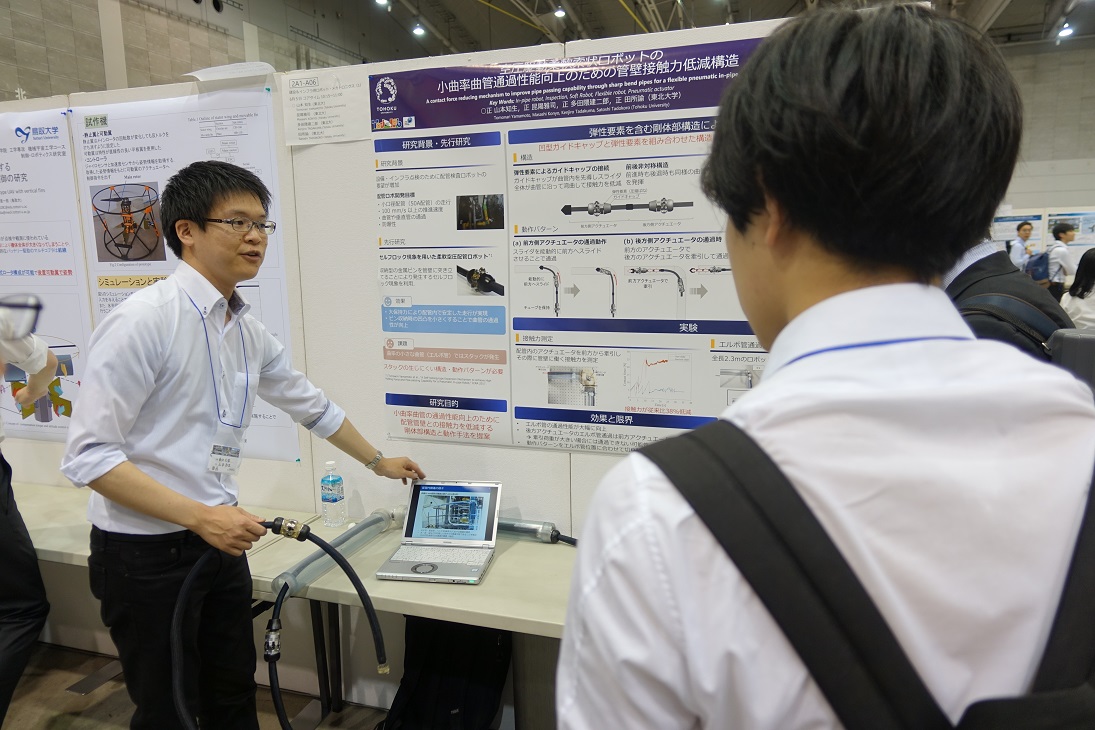
山本知生 「空圧駆動柔軟索状ロボットの小曲率曲管通過性能向上のための管壁接触力低減構造」
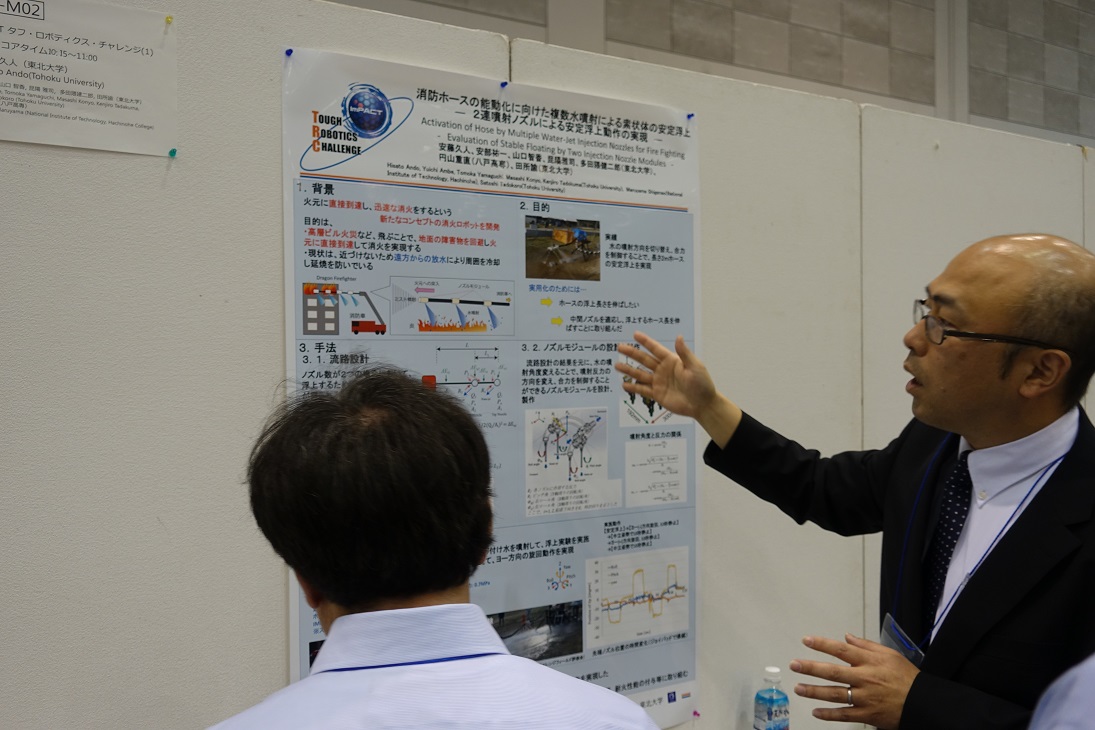
安藤久人 「消防ホースの能動化に向けた複数水噴射による索状体の安定浮上」2連噴射ノズルによる安定浮上動作の実現
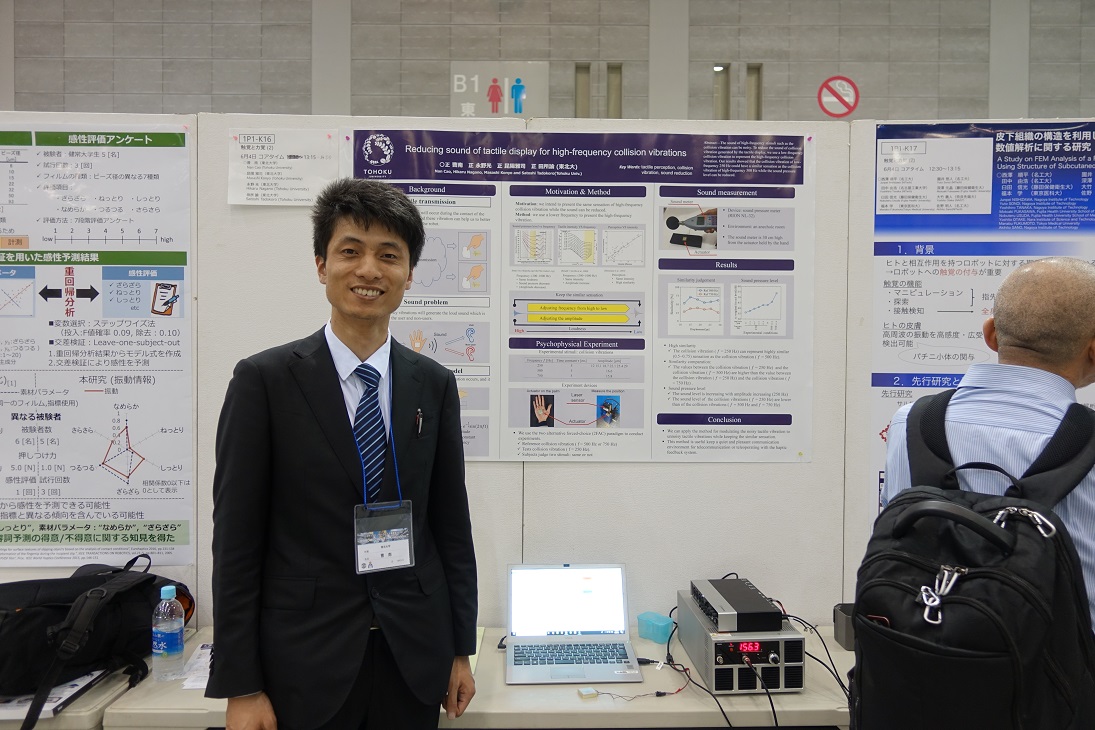
Nan Cao 「Reducing sound of tactile display for high-frequency collision vibrations」
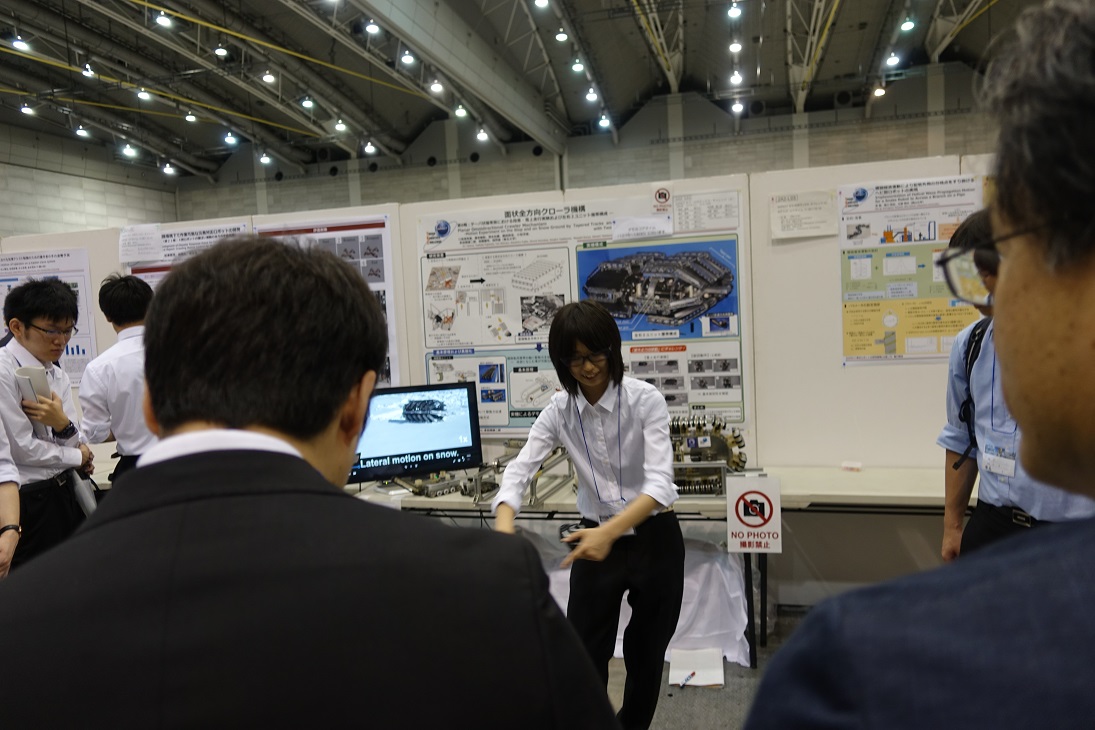
高根英里 「面状全方向クローラ機構」 ― 第8報:テーパ状履帯版における段差・雪上走行実験 および左右2ユニット履帯構成 ―
藤田政宏 「房状ジャミング膜グリッパ機構」
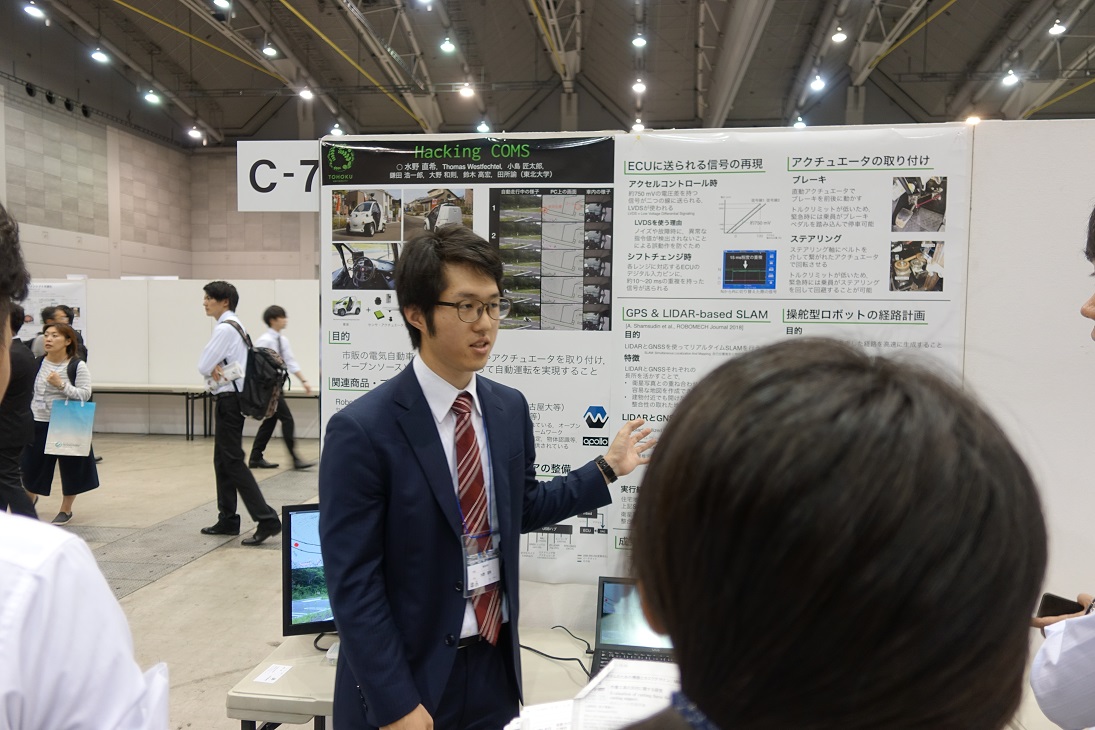
水野直希 「Hacking COMS」オープンソースプラットフォームを使って市販電気自動車で自動運転を実現する方法
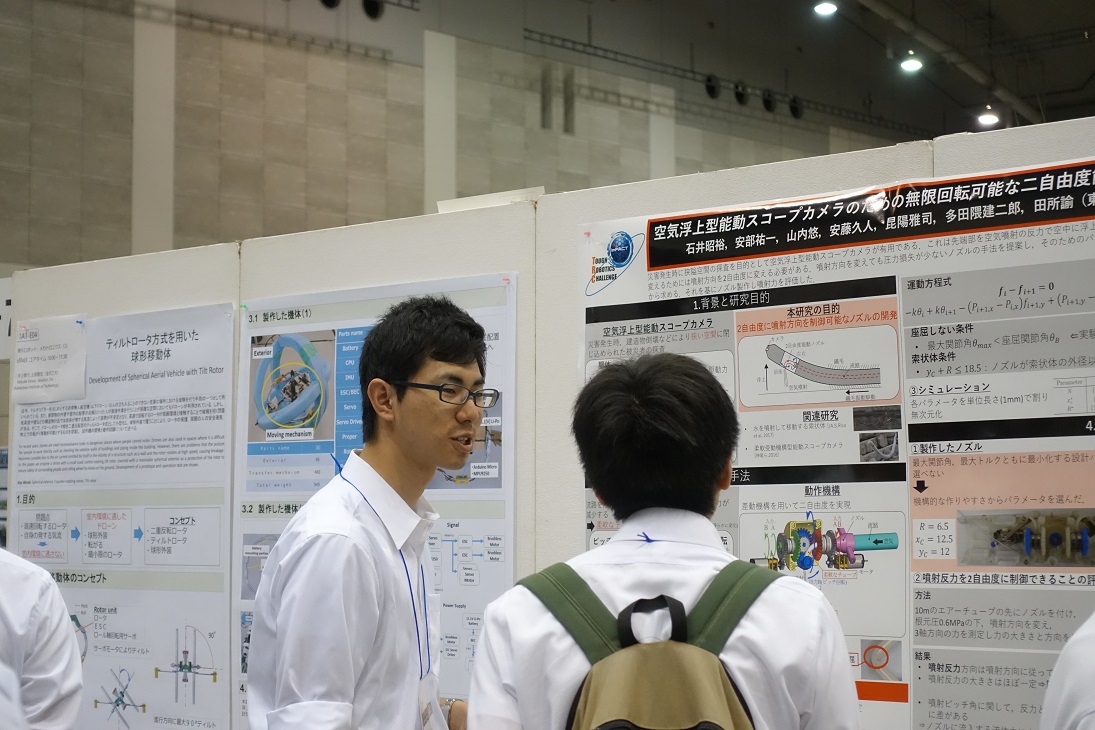
石井昭祐 「柔軟索状ロボットのための無限回転可能な二自由度能動ノズルの設計と開発」
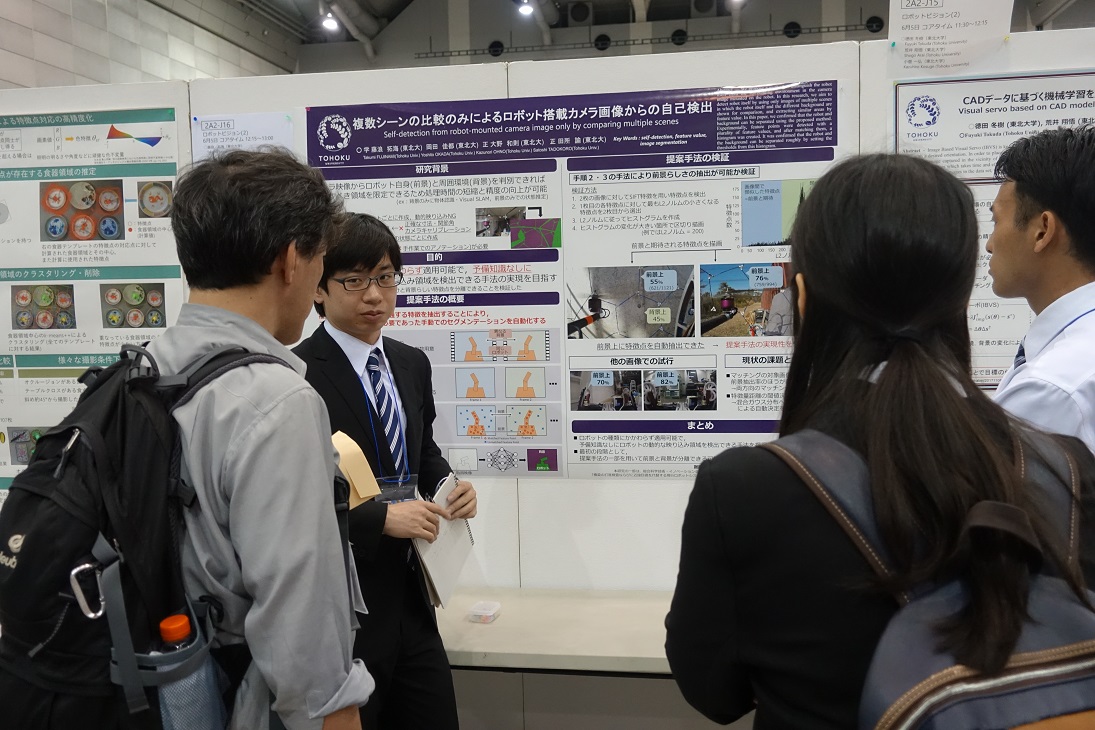
藤波拓海 「複数シーンの比較のみによるロボット搭載カメラ画像からの自己検出」
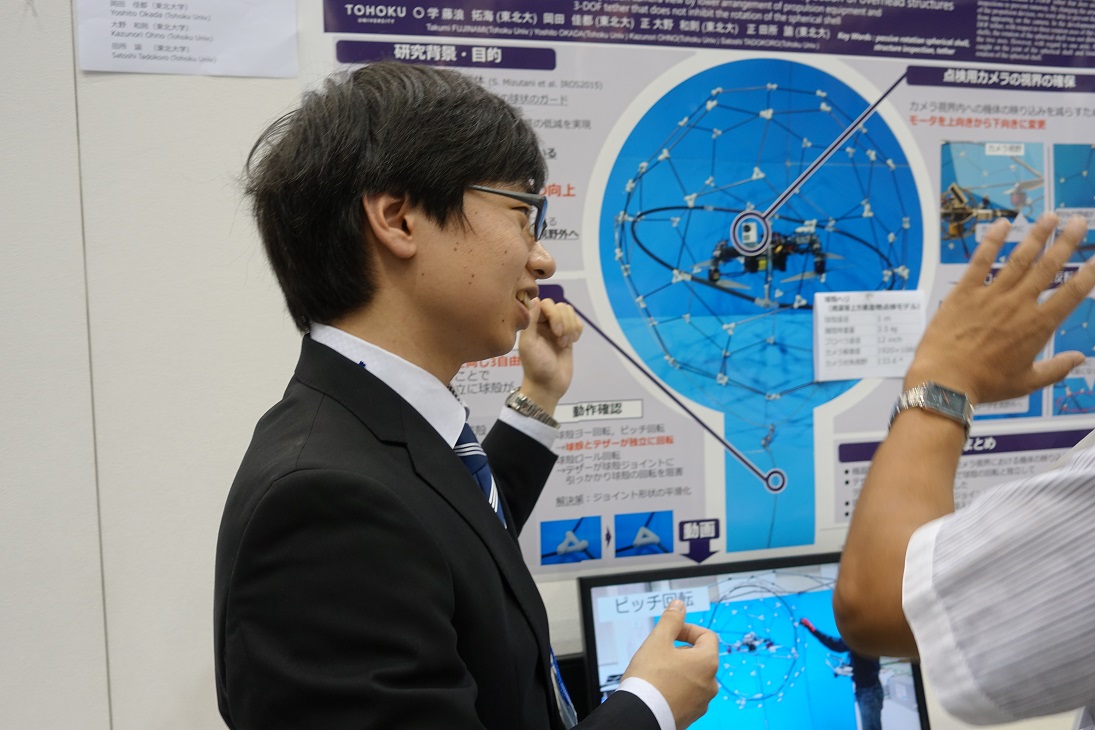
「上方構造物の点検を目的とした受動回転球殻ヘリの改良」推進機器の下部配置による点検用カメラ視界確保と球殻の回転を阻害しない3 自由度テザー
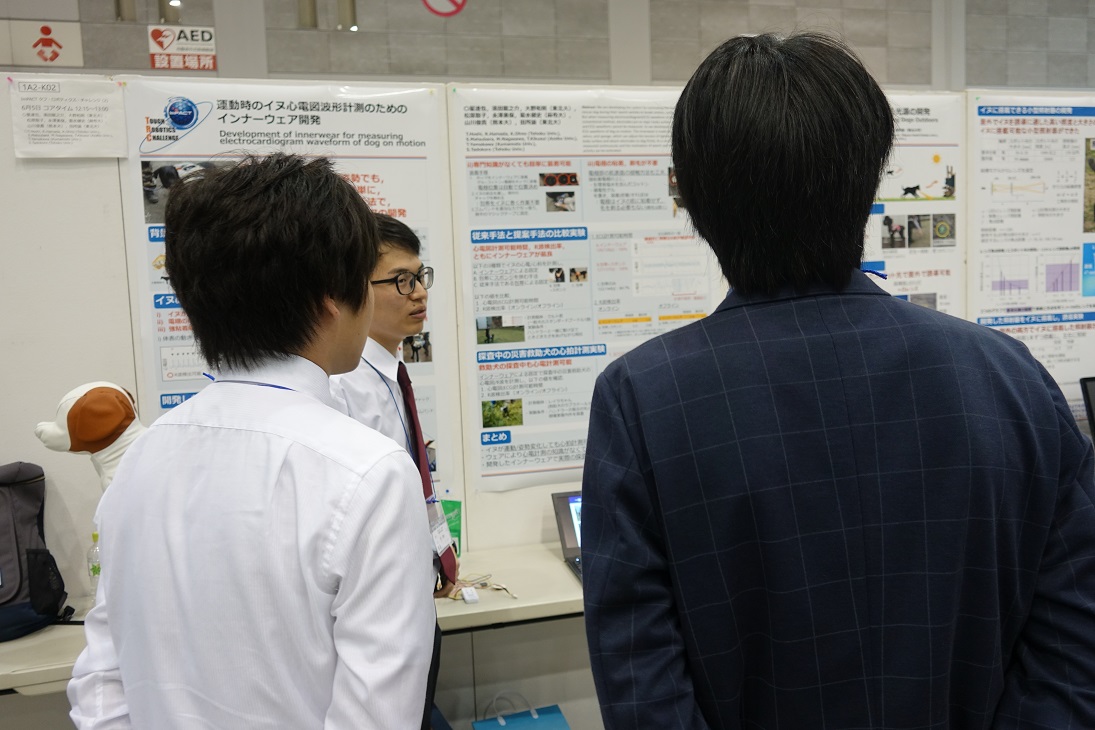
星達也 「運動時のイヌ心電図波形計測のためのインナーウェア開発」
荒木真吾 「能動スコープカメラにおける長手方向の接触位置推定方法の検討」第2 報:接触推定精度の向上に向けたモデルの再検討と未知環境での試験
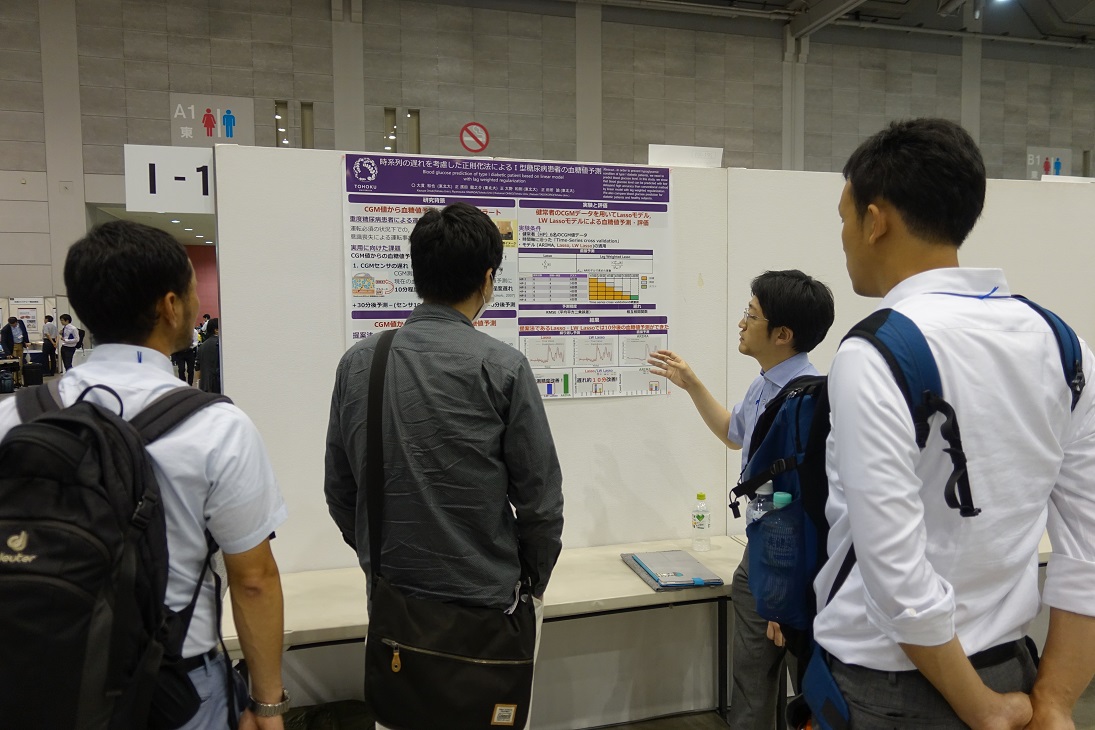
大貫和也 「時系列の遅れを考慮した正則化法によるI 型糖尿病患者の血糖値予測」
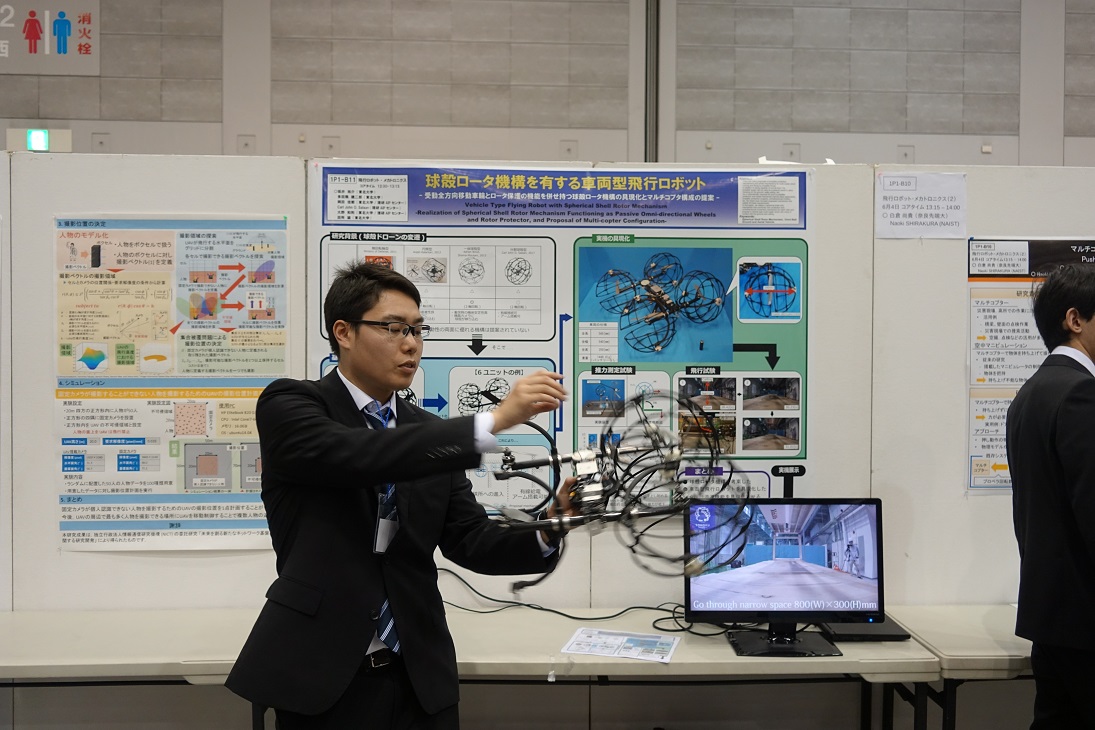
坂井祐介 「球殻ロータ機構を有する車両型飛行ロボット」受動全方向移動車輪とロータ保護の機能を併せ持つ球殻ロータ機構の具現化とマルチコプタ構成の提案
西村礼貴 「軸方向推進の観点からの全方向駆動メカニズム」
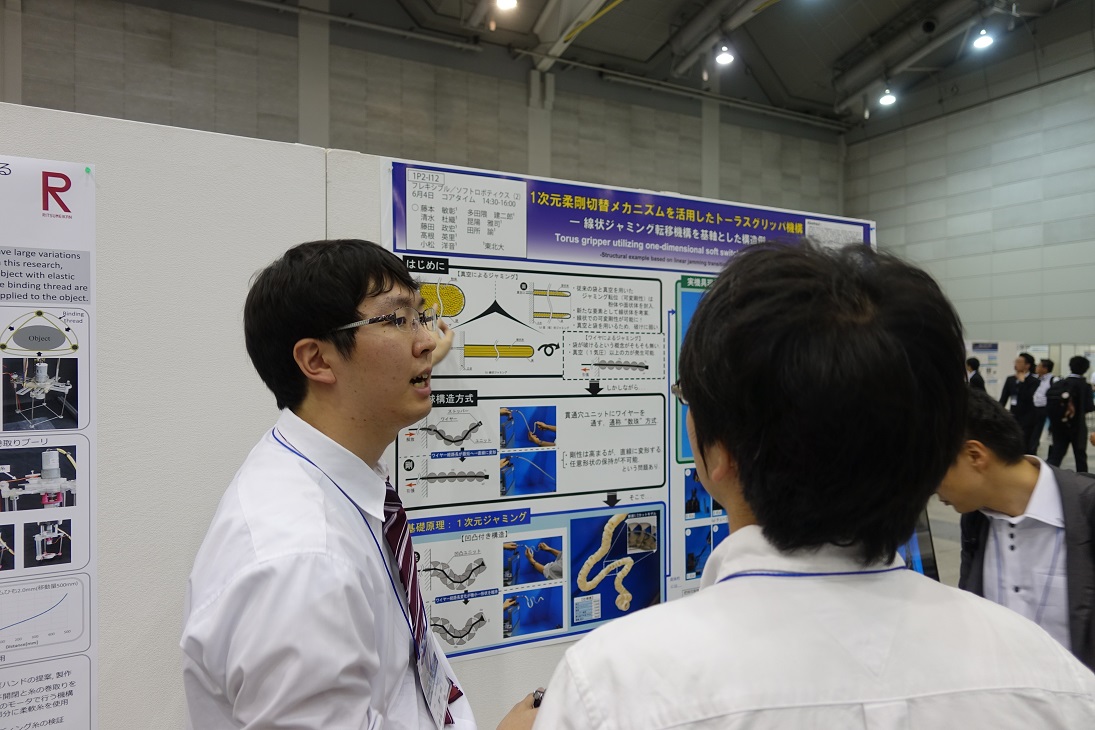
藤本敏彰 「1 次元柔剛切替メカニズムを活用したトーラスグリッパ機構」線状ジャミング転移機構を基軸とした構造例
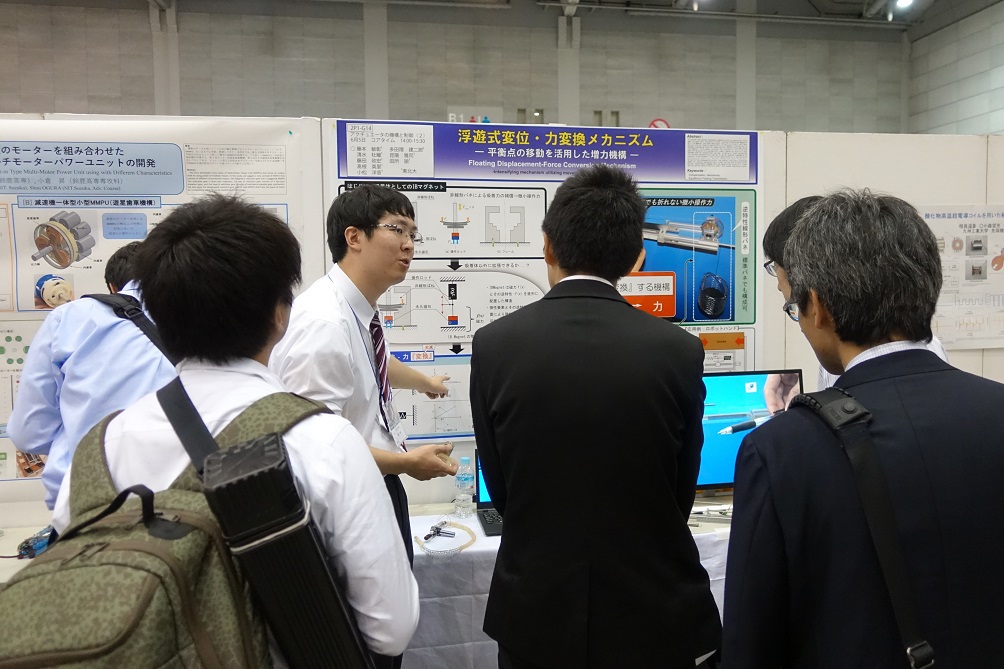
「浮遊式変位・力変換メカニズム」ー 平衡点の移動を活用した増力機構 ー
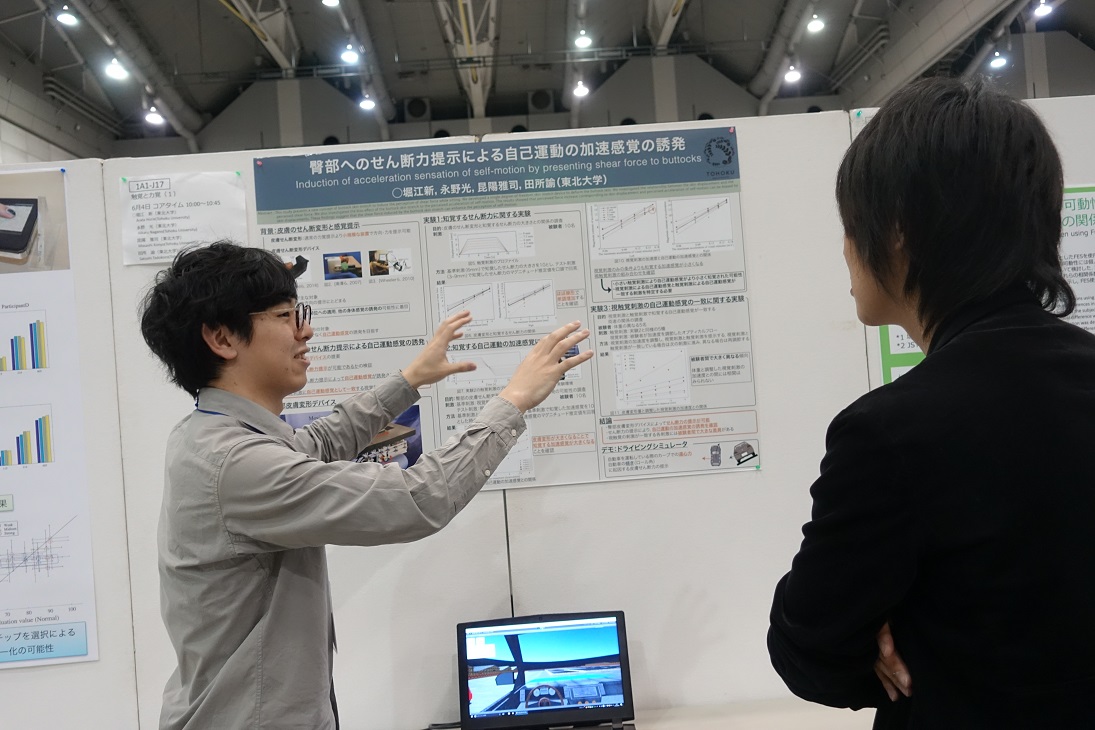
堀江新 「臀部へのせん断力提示による自己運動の加速感覚の誘発 」
山内悠 「エアカーテンにより内圧を高めた空気噴射ノズルの提案」
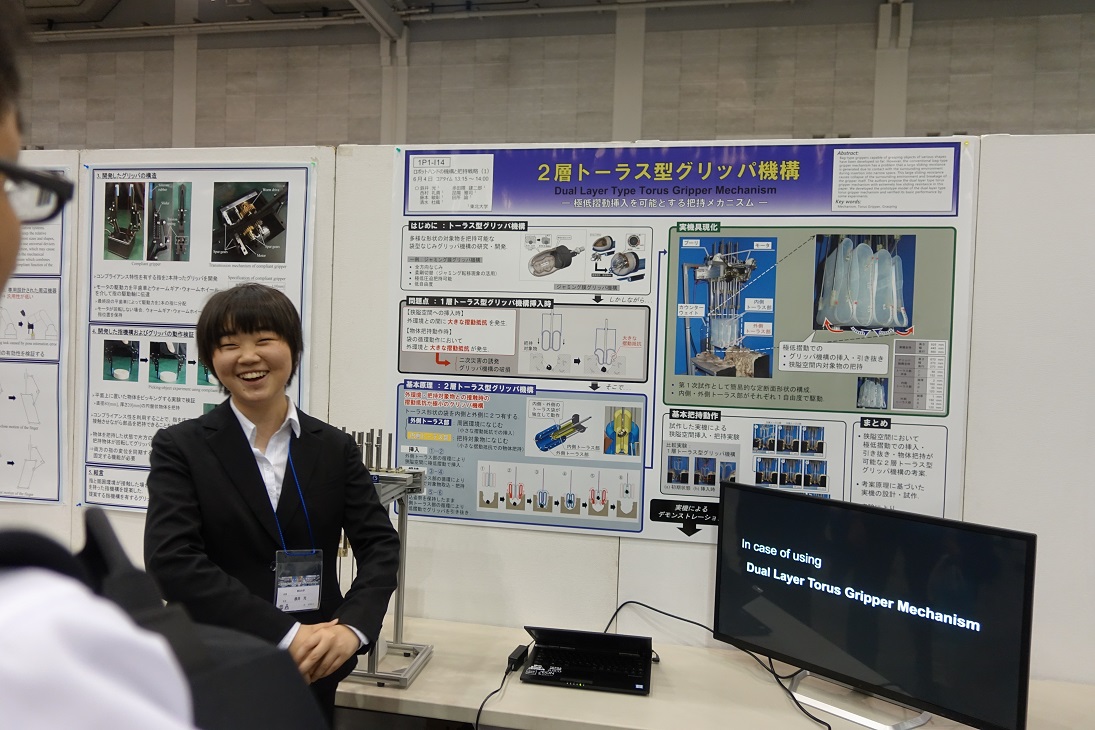
鉄井光 「2層トーラス型グリッパ機構」
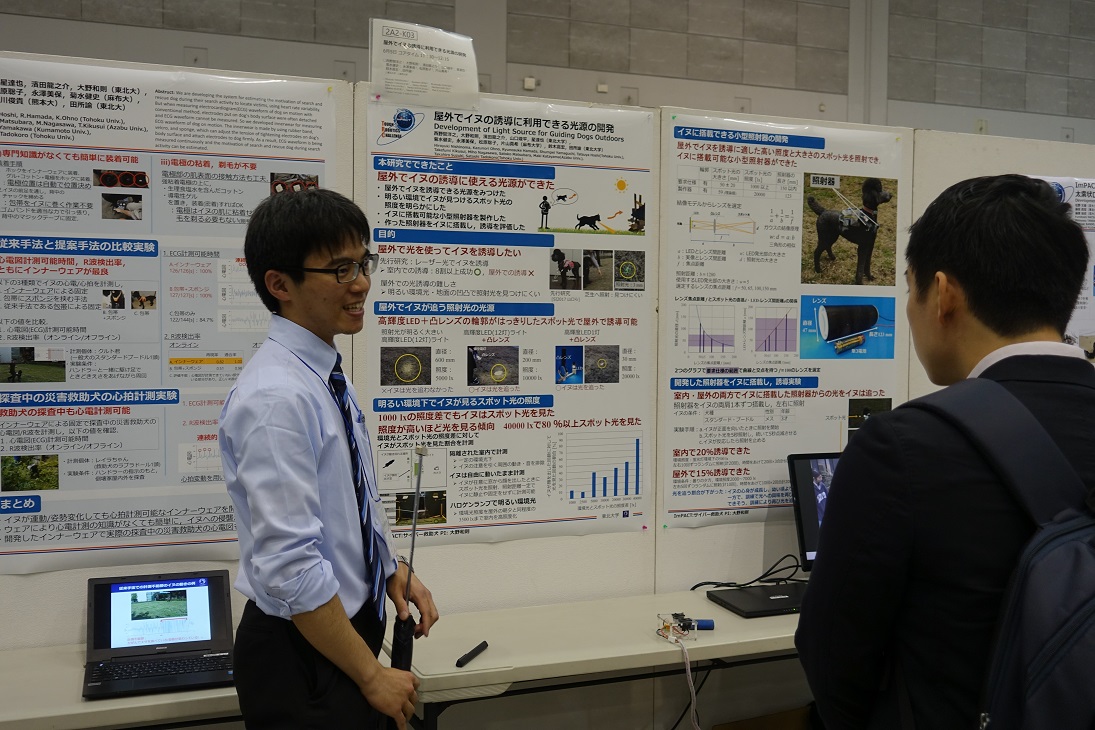
西野間洋之「屋外で犬の誘導に利用できる光源の開発」
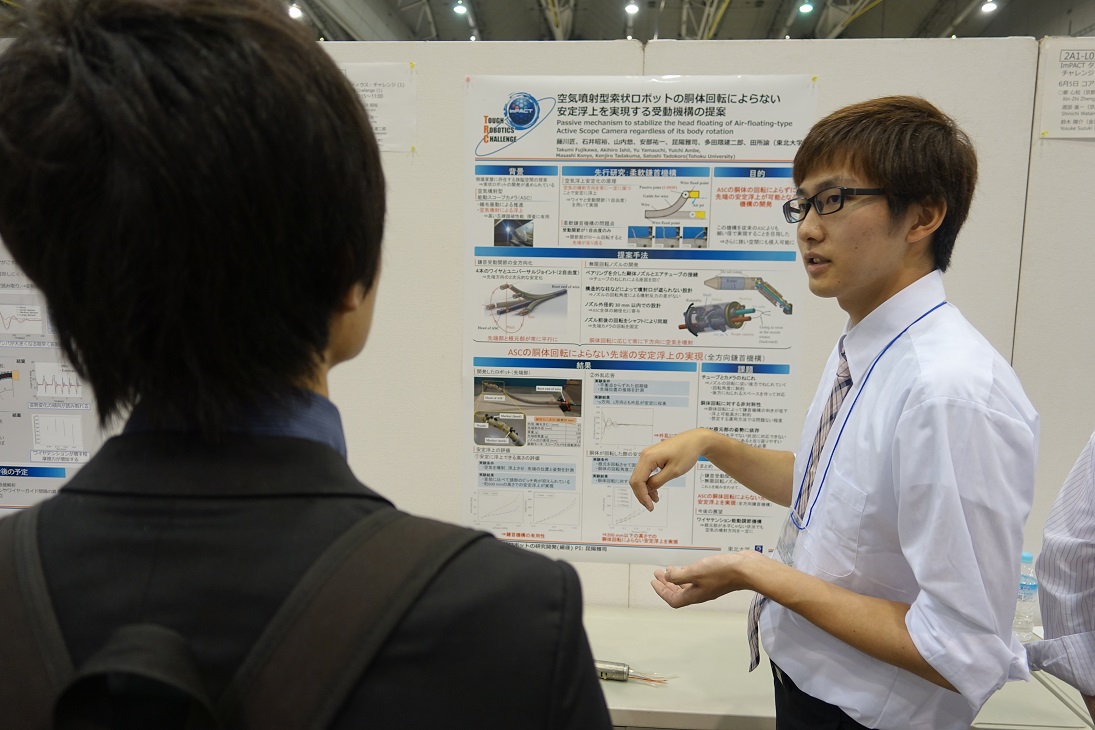
藤川匠 「空気噴射型索状ロボットの胴体回転によらない安定浮上を実現する受動機構の提案」
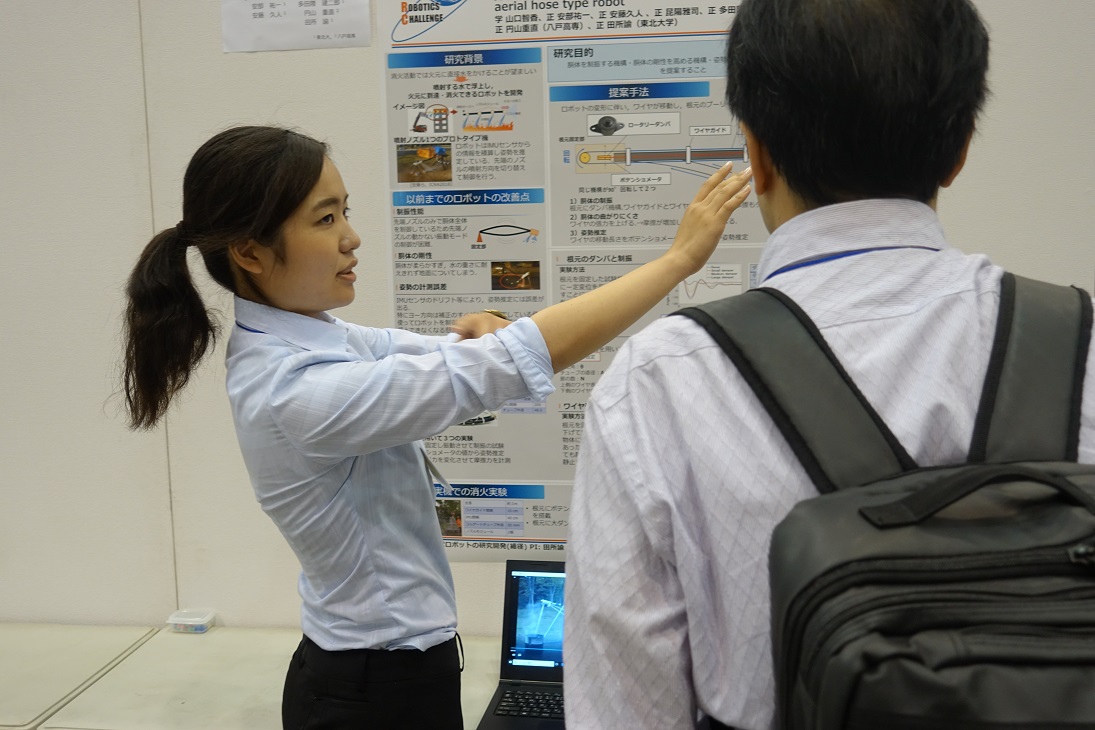
山口智香 「浮上型索状ロボットのためのワイヤを用いた制振に関する研究」
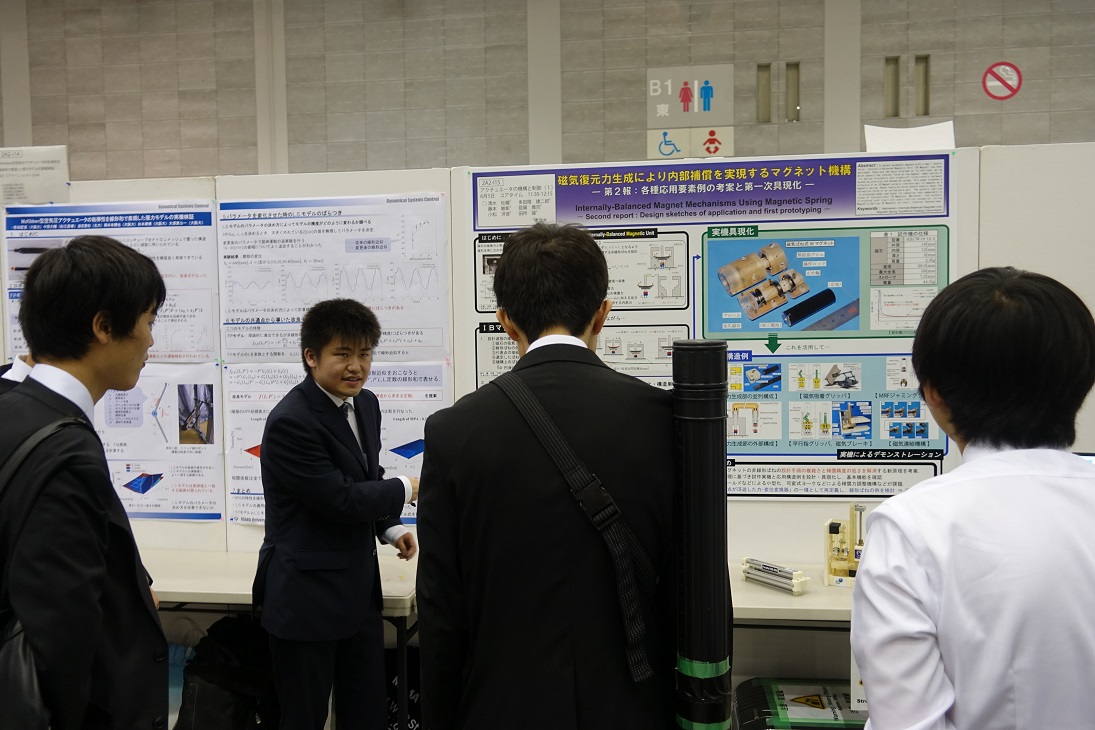
清水杜織 「磁気復元力生成により内部補償を実現するマグネット機構」― 第2報 各種応用要素例の考案と第一次具現化 ―
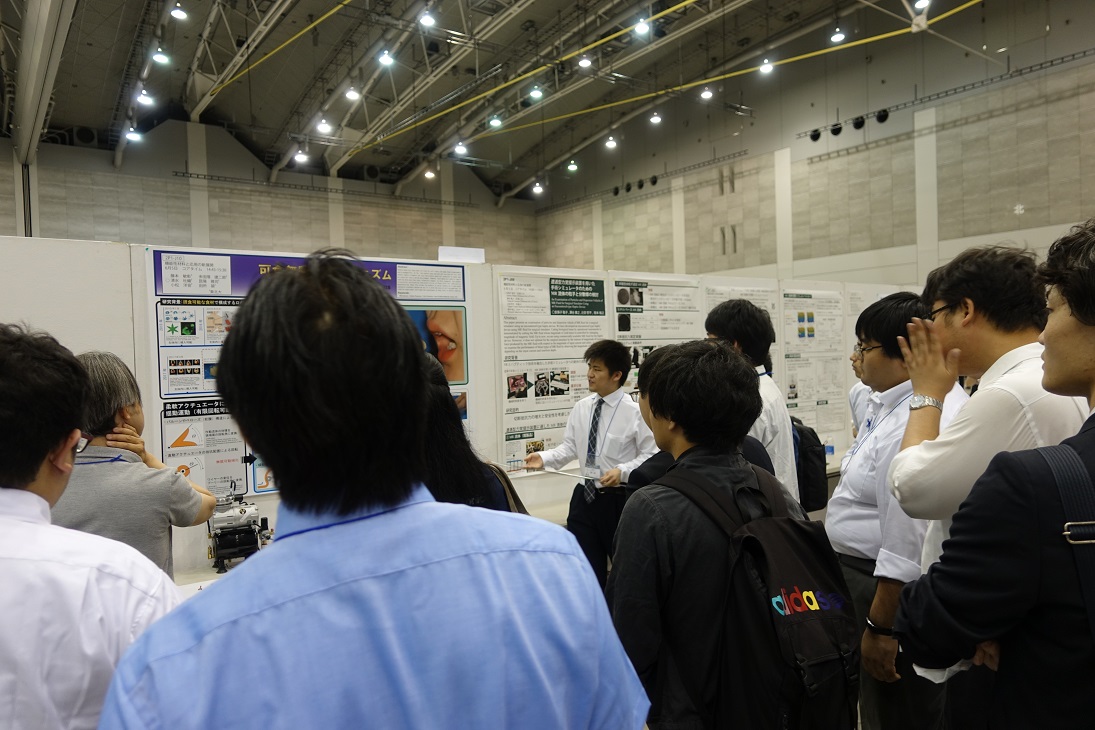
「可食無限回転メカニズム」