NEWS
Robomech2017に参加しました
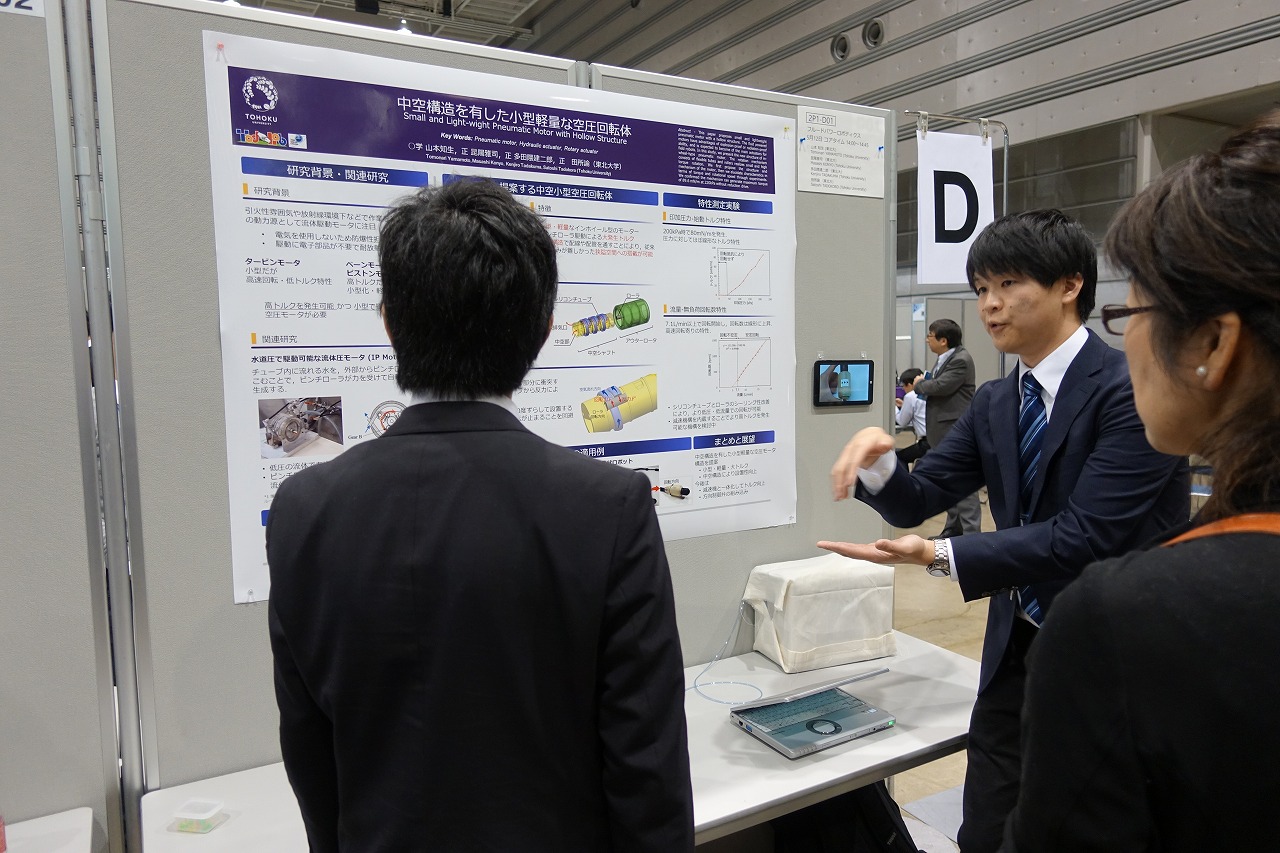
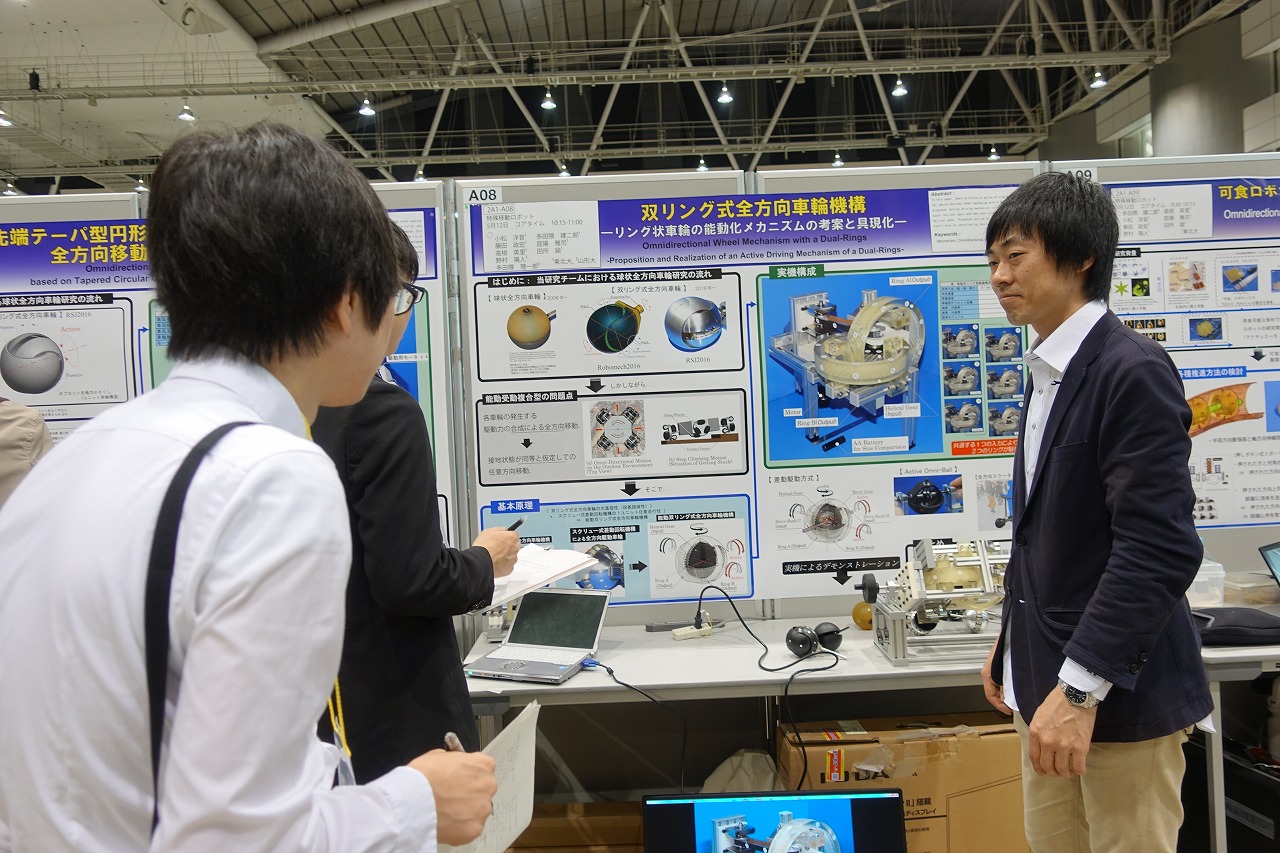
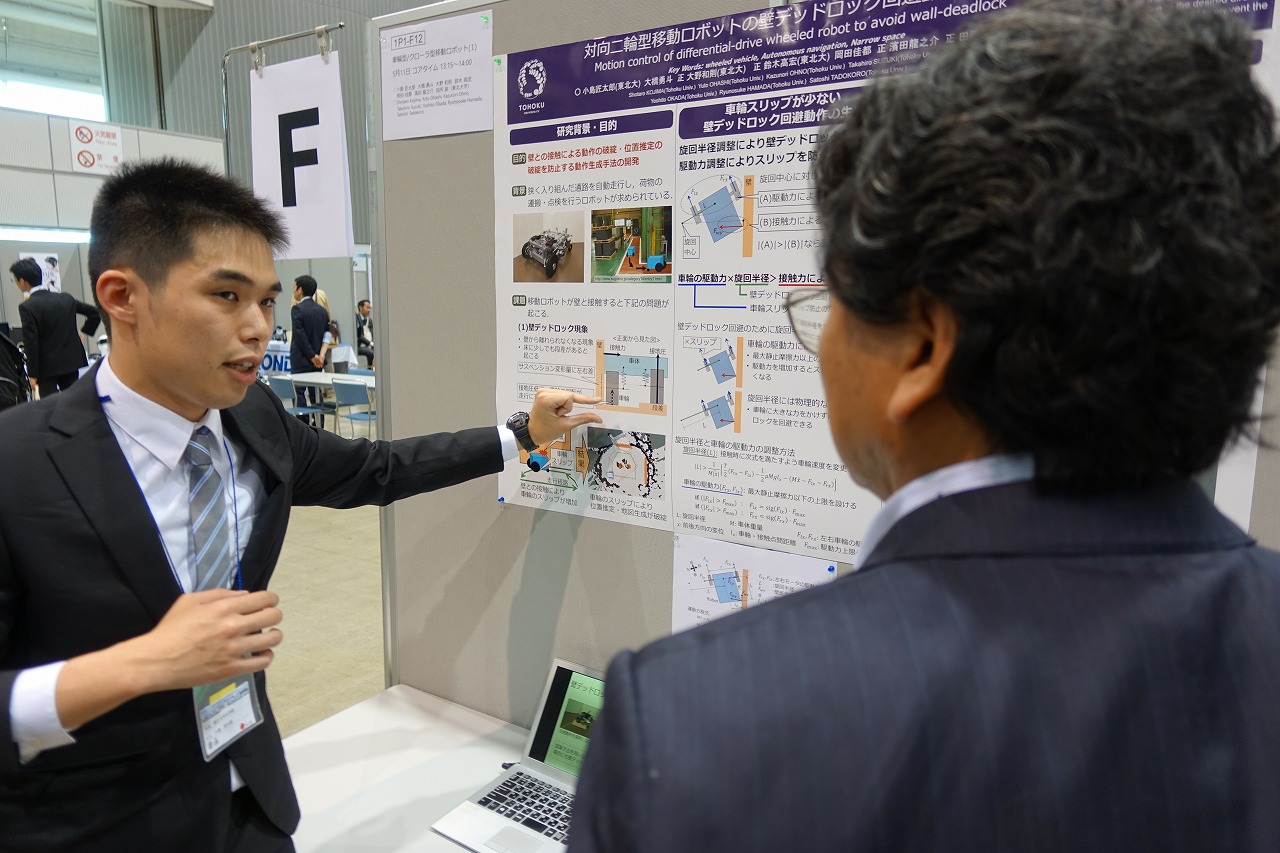
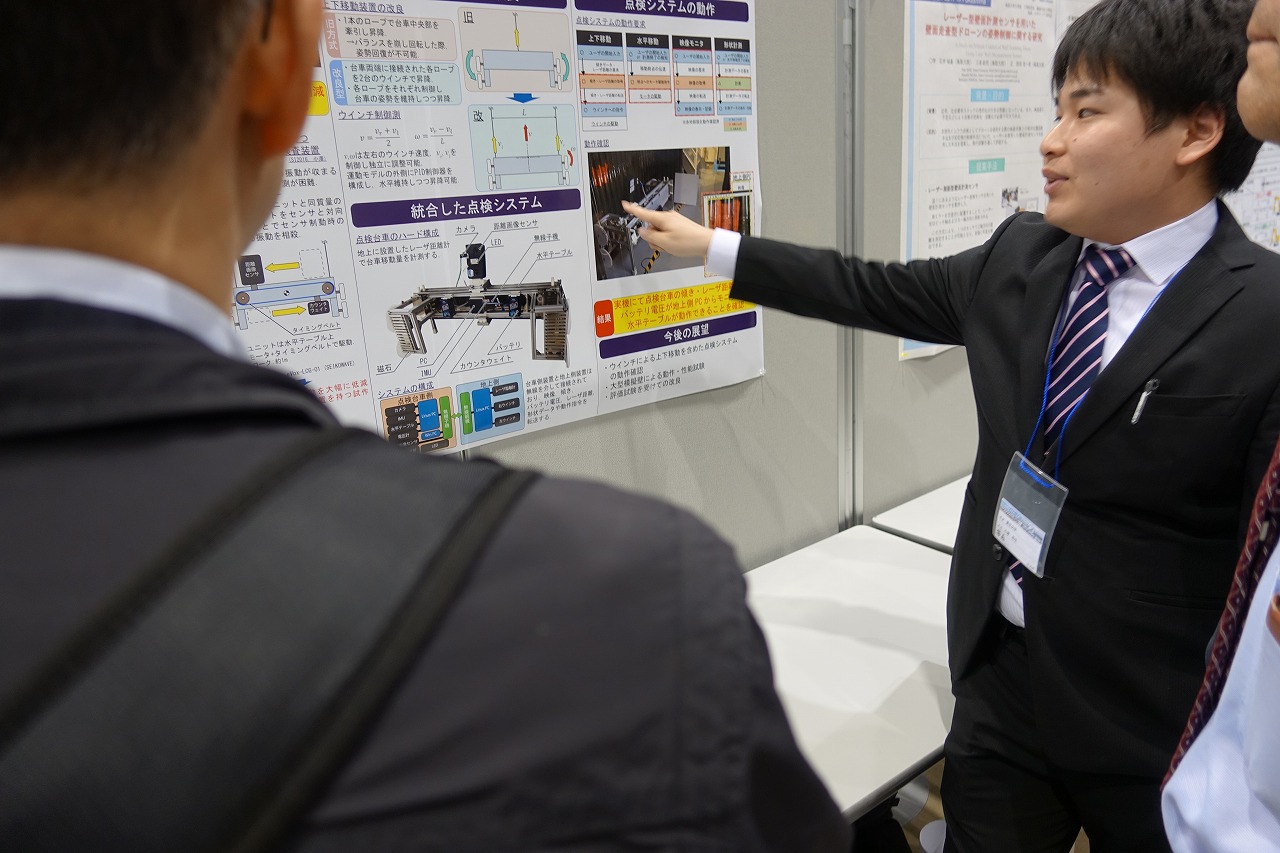
5月11,12日に福島で開催されたROBOMECH2017に参加しました.
田所教授,多田隈准教授,永野特任助教,小松特任助教,濱田助教,安部特任助教,藤田政宏,飯塚将太,小澤将生,藤浪拓海,小島匠太郎,野村陽人,馬場麻里奈,安藤久人,大橋勇斗,梶原正裕,杉本鎌,水野直希,竹之内栄人,高根英里,星達也,石井昭裕,山口竣平,加藤佳大,Gu,Dennis,Cao,Danielが発表しました。
発表題目は以下の通りです。
田所諭 "ImPACT タフ・ロボティクス・チャレンジ"
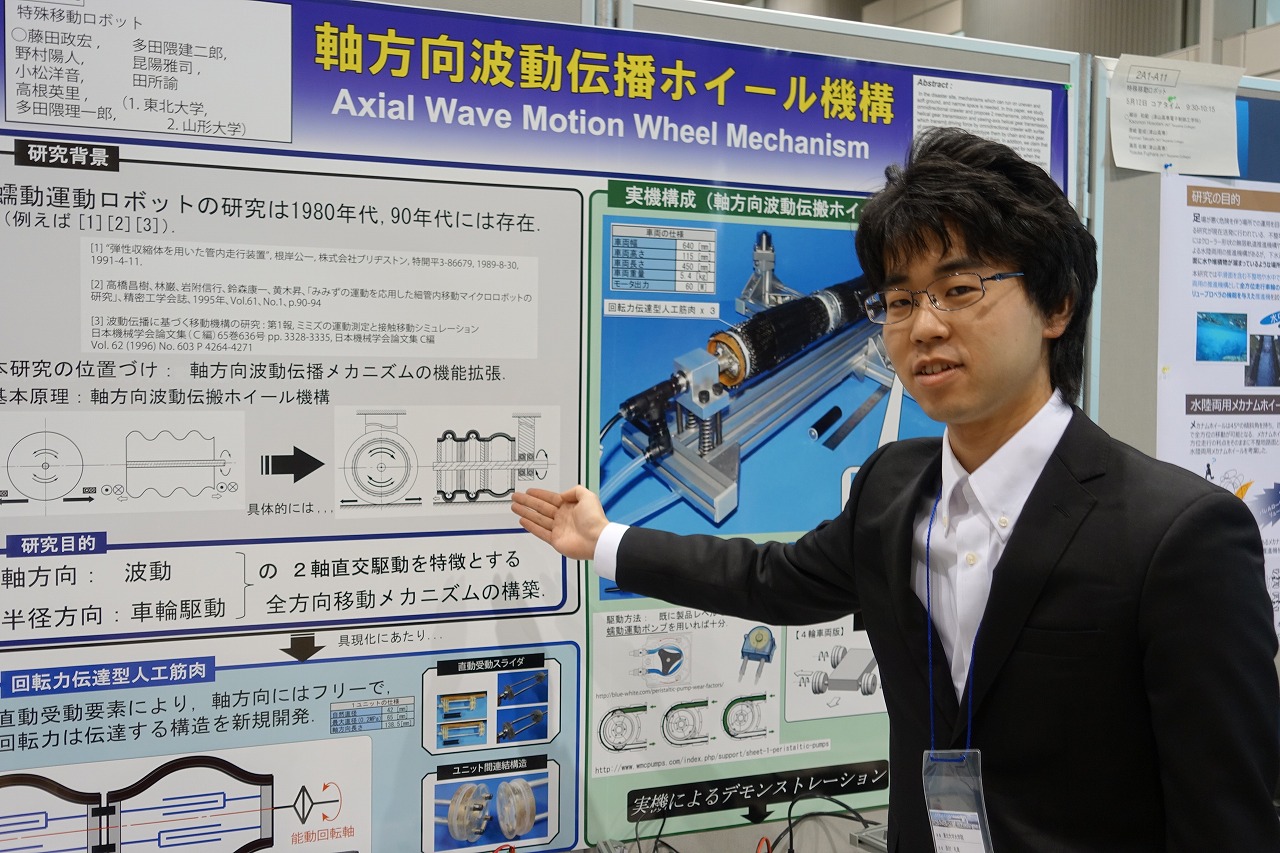
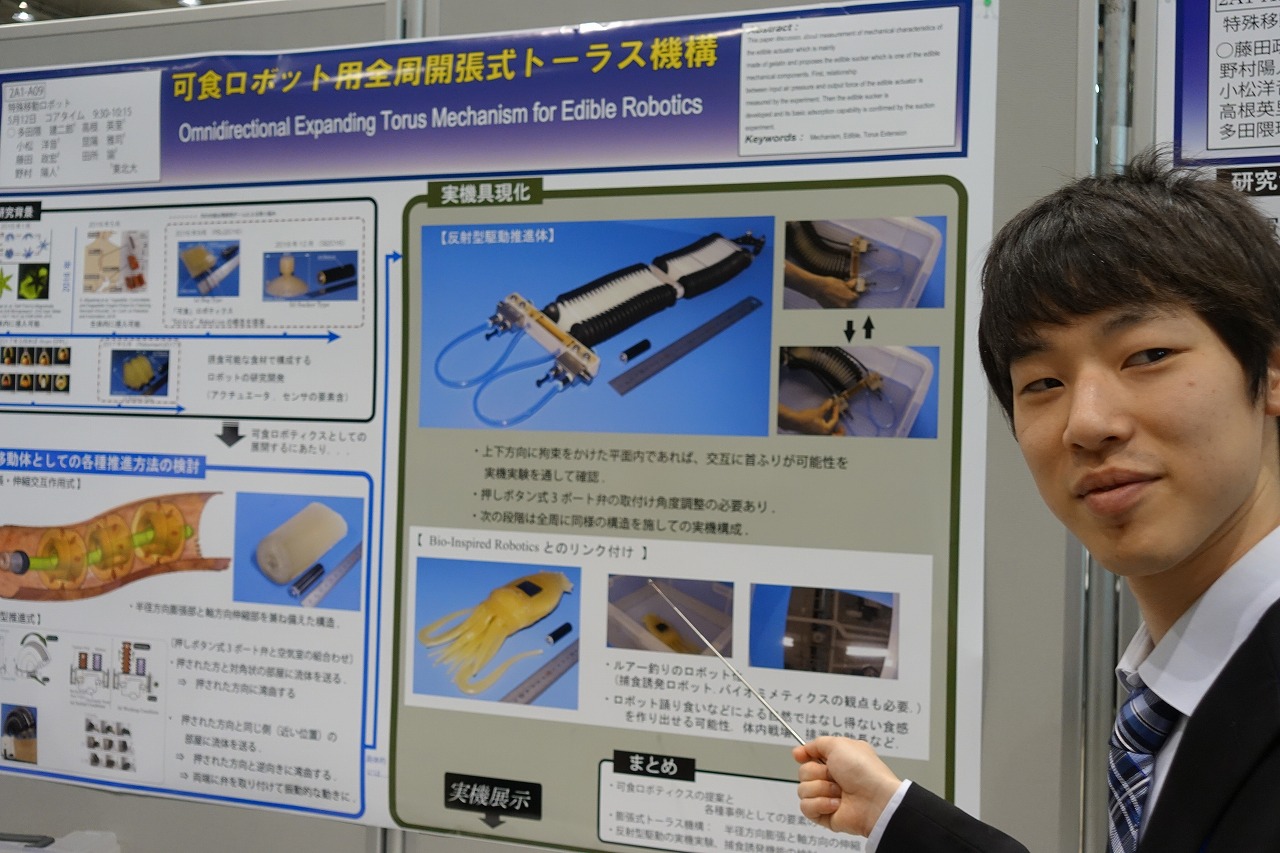
多田隈健二郎 "可食ロボット用全周開張式トーラス機構" "軸方向波動伝播ホイール機構"
永野光 "狭隘瓦礫を探査する能動スコープカメラのための接触情報の検出と提示 災害環境を模したフィールド実証実験の結果"
小松洋音 "可食アクチュエータ 第3報:ベローズ状アクチュエータの具現化と基本的特性"
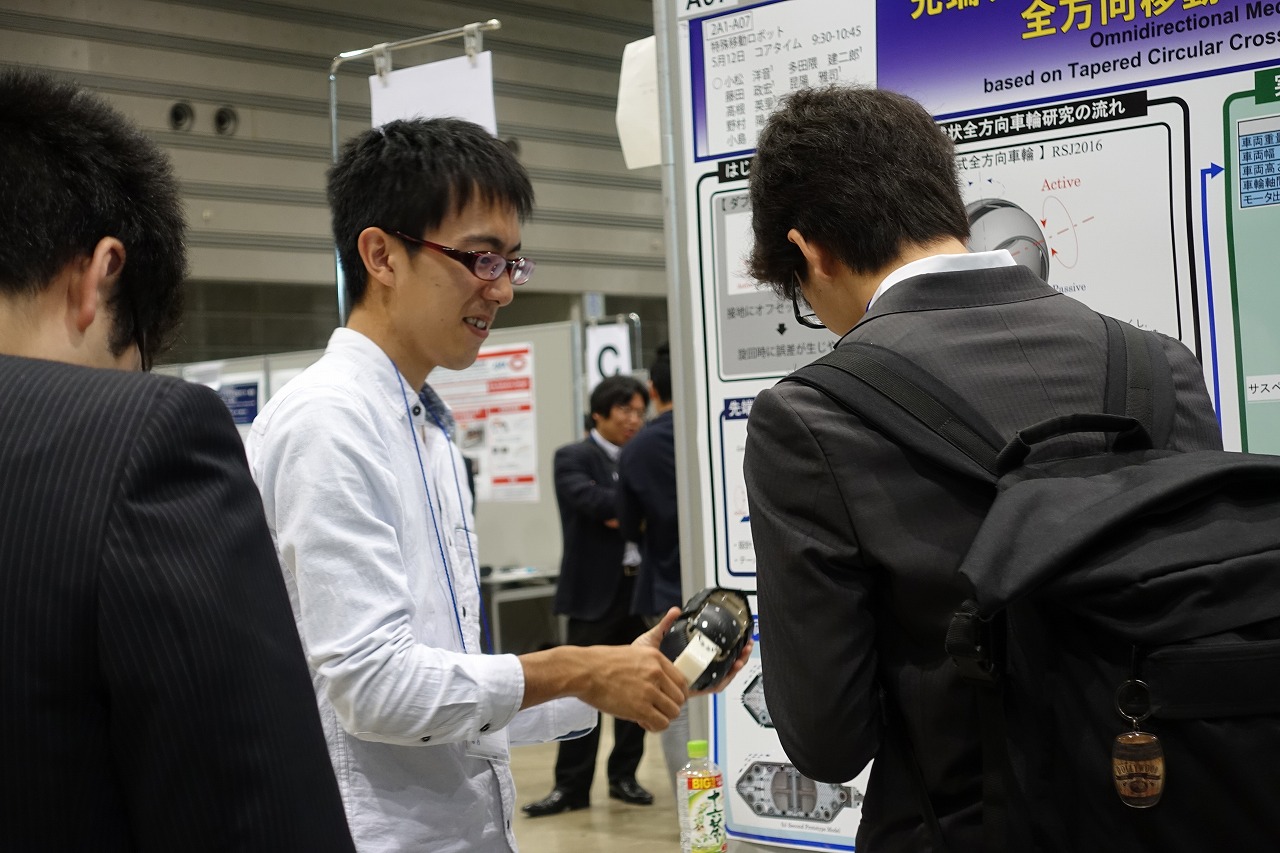
"先端テーパ型円形断面機構に基づく全方向移動メカニズム"
"双リング式全方向車輪機構"
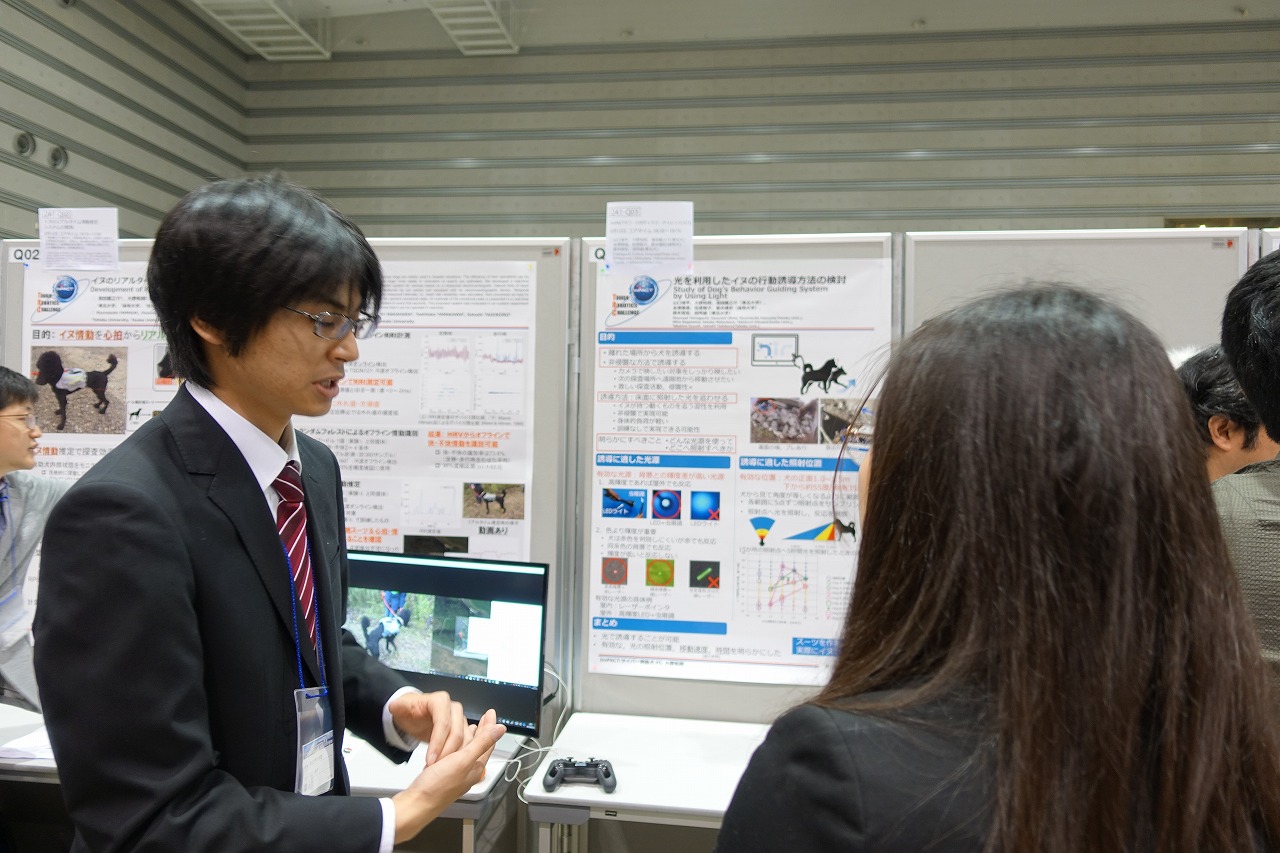
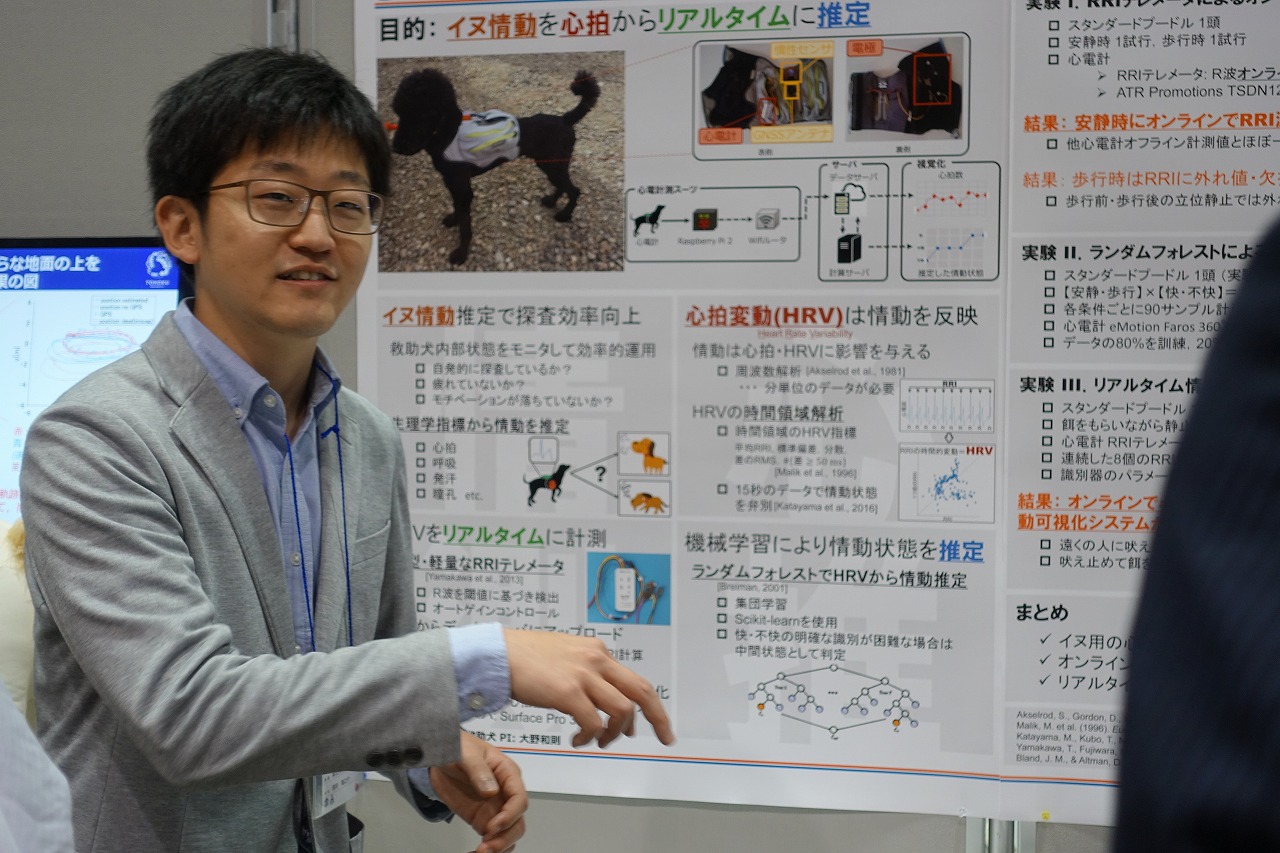
濱田龍之介 "イヌのリアルタイム情動推定システムの開発"
安部祐一 "空気噴射型能動スコープカメラの性能評価実験"
"索状体の噴射を用いた浮上制御方法に関する考察" "感覚機能統合型能動スコープカメラの開発"
藤田正宏 "剛性可視化マーカ機構 -内部低圧状態に着目した隣接室式構造の提案ー”
”能動変形可能なジャミング膜グリッパ機構ー挿入除去作業用扁平型エンドエフェクタの索状プラットフォームとの統合−"
"無摺動式トーラス型伸展指機構ー 密集環境内における軟弱・脆弱対象物としての幼鶏体の抱擁的把持を目的とした効果器―”
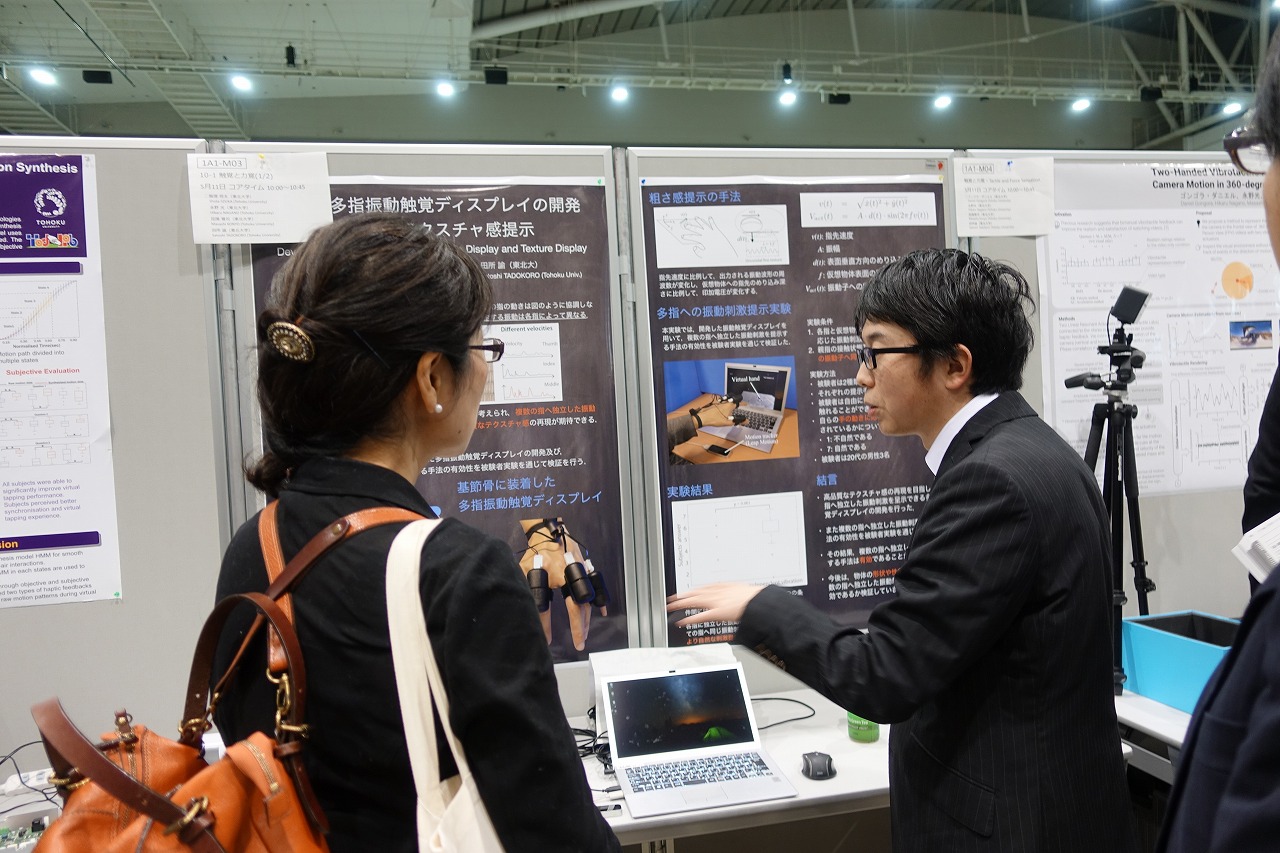
飯塚将太 "多指振動触覚ディスプレイの開発とテクスチャ感提示"
小澤将生 "大型ボイラ内壁を検査するロボットシステムの開発 上下移動機構と試作点検台車の統合による点検システムについての警告"
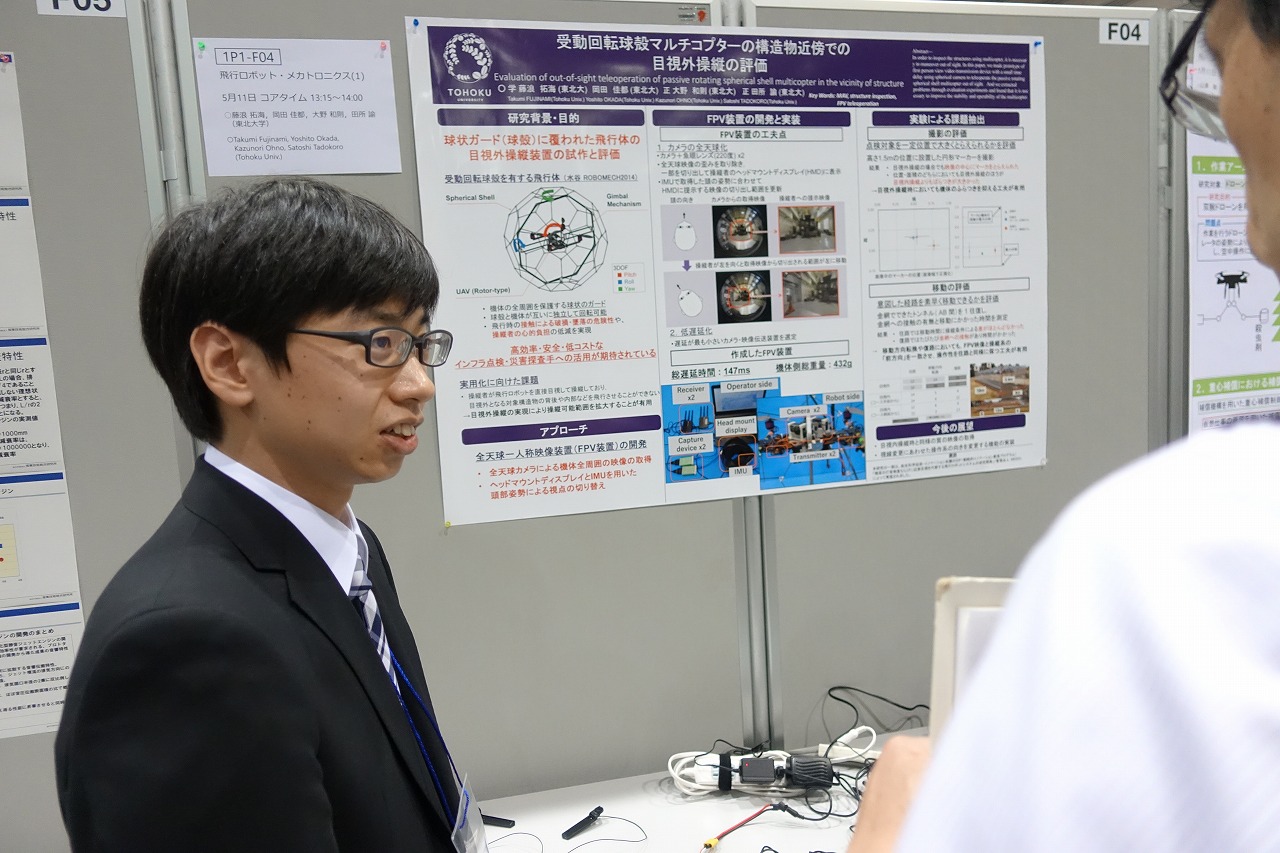
藤浪拓海 "受動回転球殻マルチコプターの構造物近傍での目視外操縦の評価”
小島匠太郎 "対向二輪型移動ロボットの壁デッドロック回避動作の生成"
野村陽人 "スクリュー式差動回転機構 前後方向踏破性向上のための全方向駆動車輪を直列配置した車両の具現化"
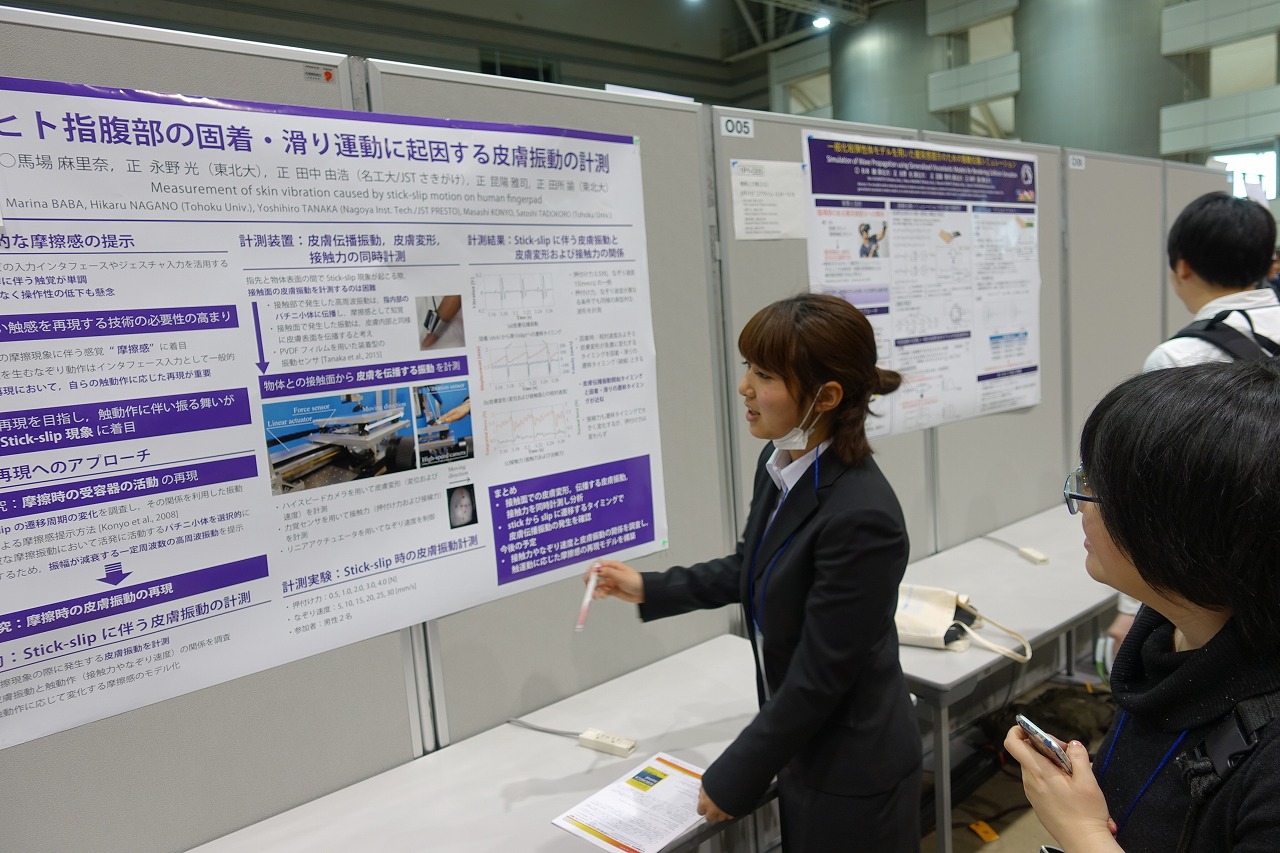
馬場麻里奈 "ヒト指腹部の固着・滑り運動に起因する皮膚振動の計測"
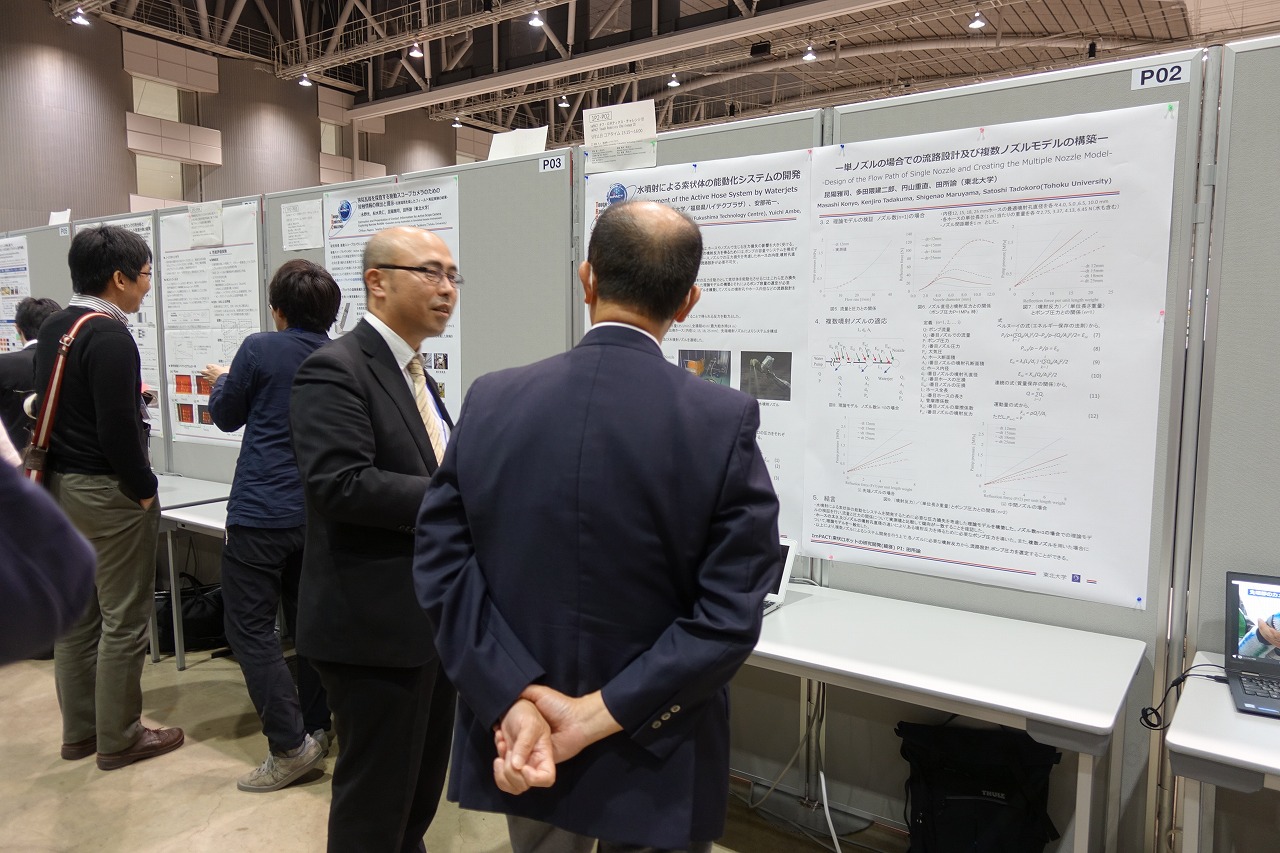
安藤久人 "水噴射による索状体の能動化システムの開発 −単ノズルの場合での流路設計及び複数ノズルモデルの構築−"
大橋勇斗 "意図的な壁との接触を利用したクローラロボットの階段での旋回中の滑落抑制"
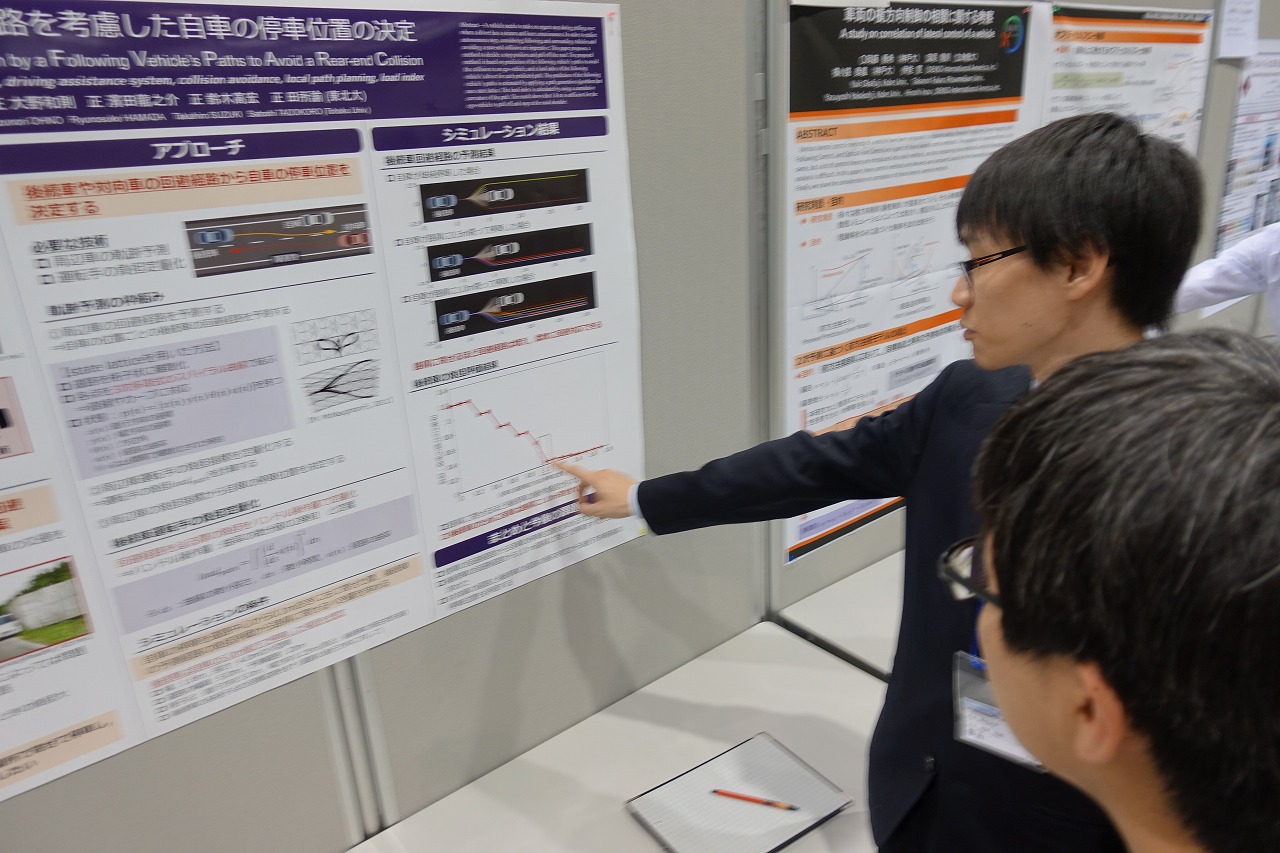
梶原正裕 "後続車の回避経路を考慮した自車の停車位置の決定"
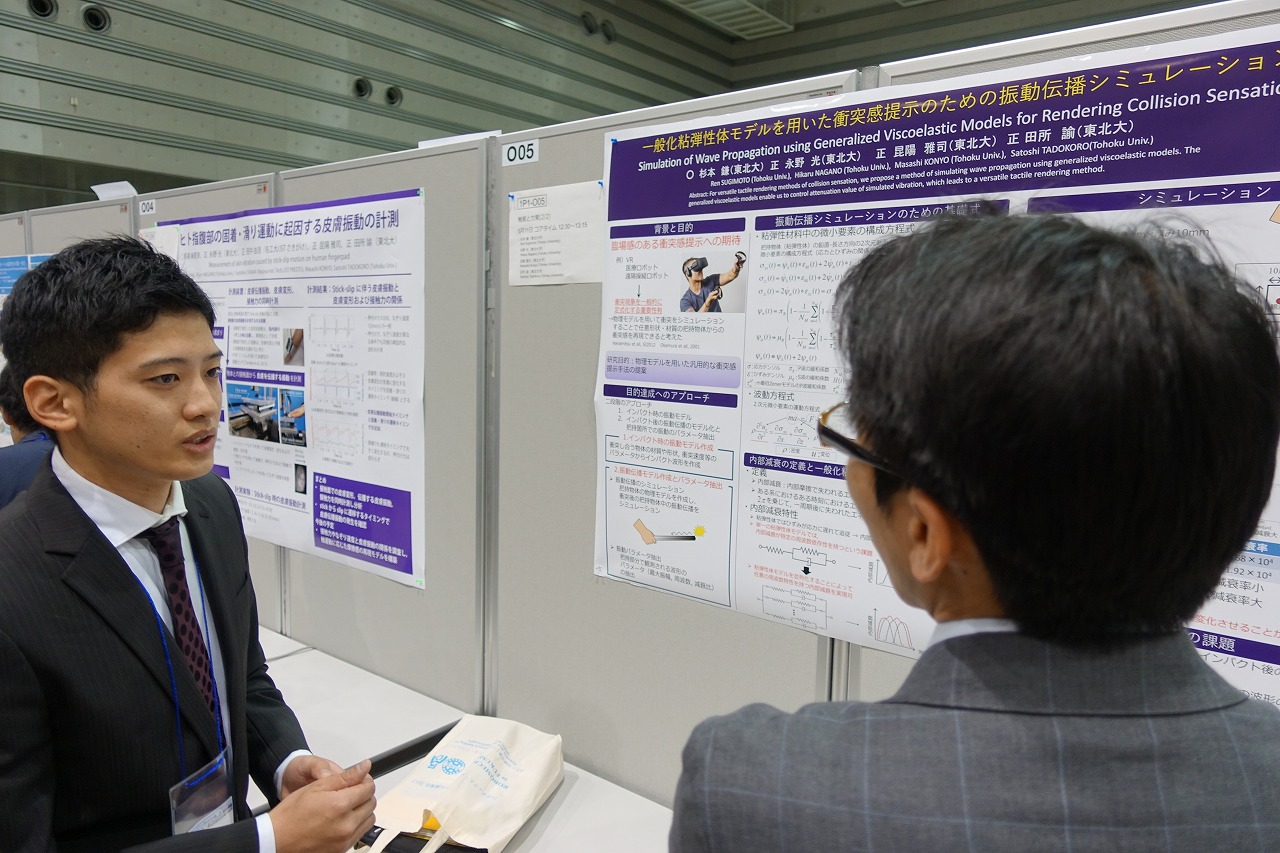
杉本鎌 "一般化粘弾性体モデルを用いた衝突感提示のための振動伝播シミュレーション"
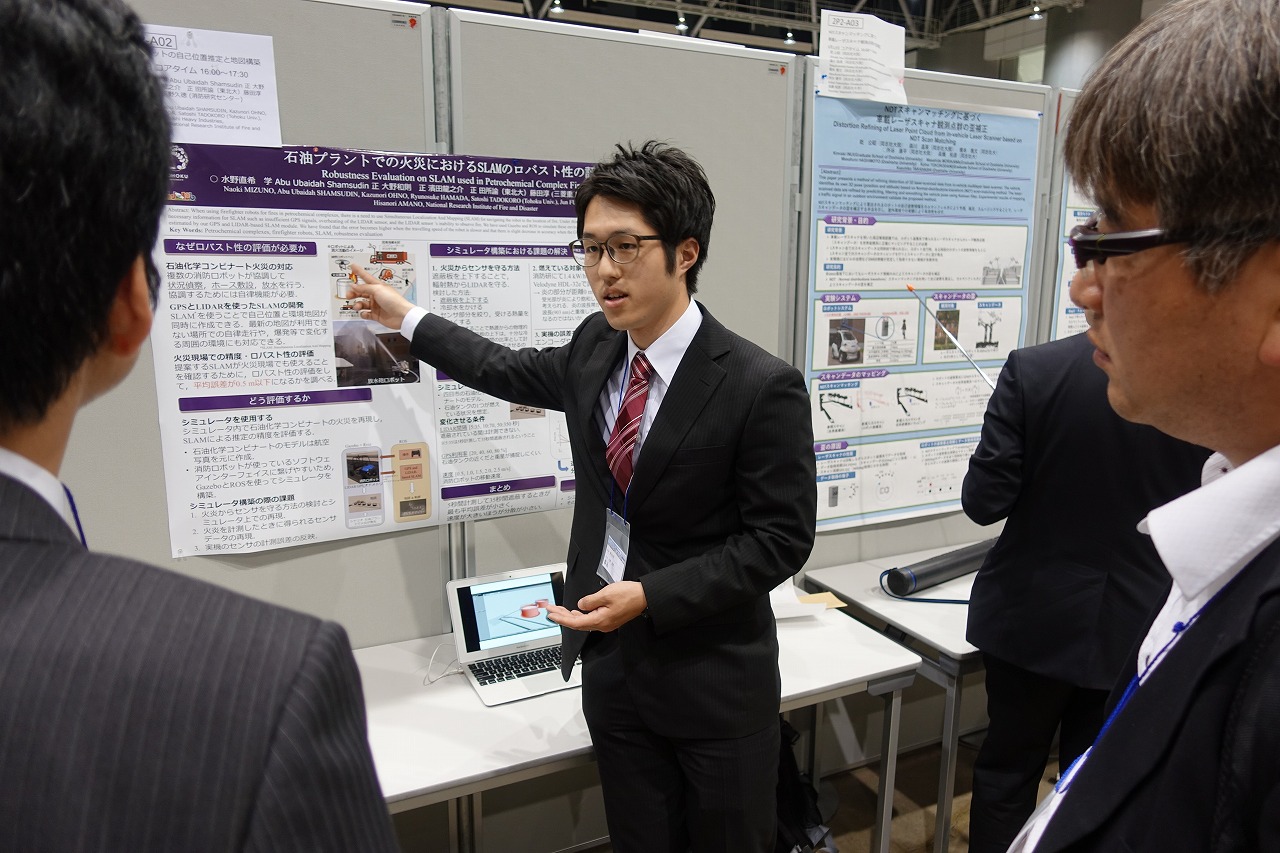
水野直希 "石油プラントでの火災におけるSLAMのロバスト性の評価"
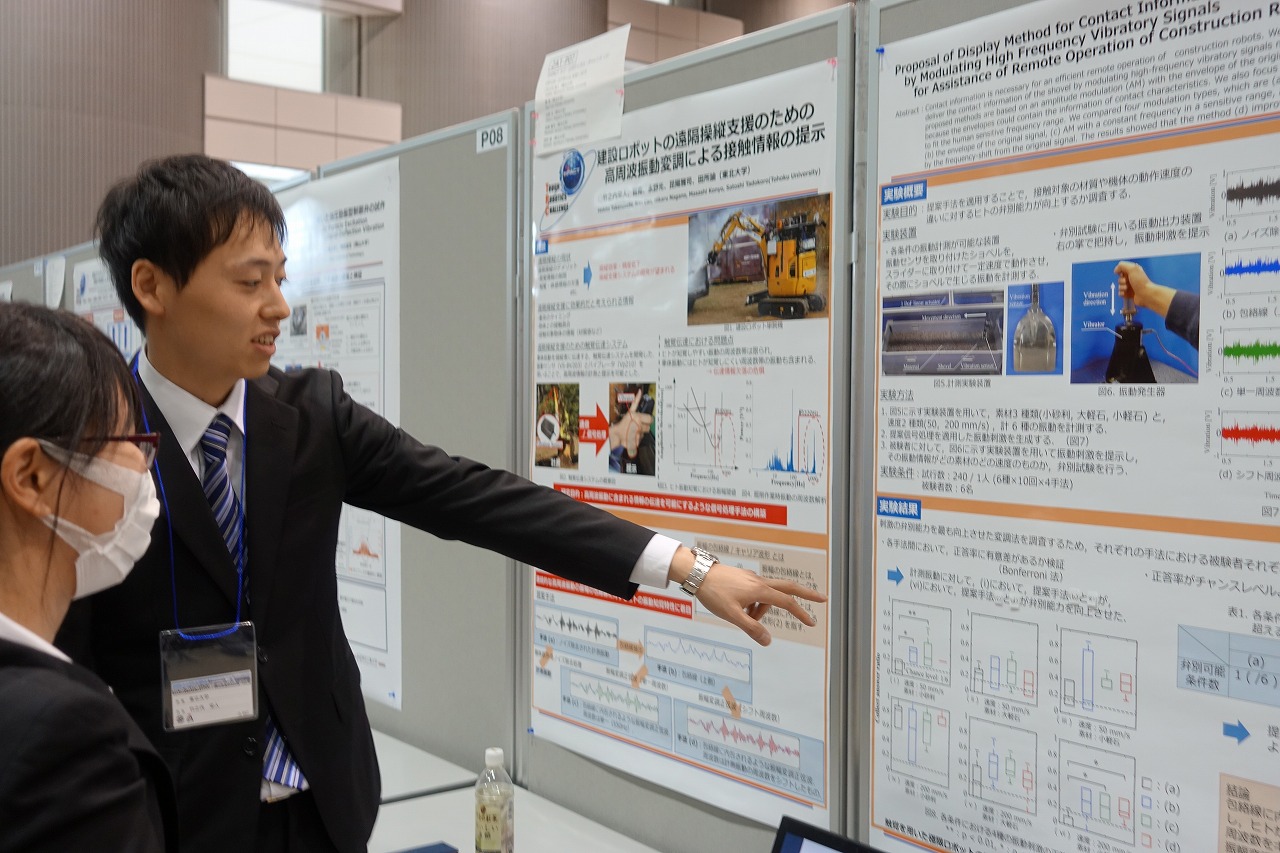
竹之内栄人 "建設ロボットの遠隔操縦支援のための高周波振動変調による接触情報の提示"
高根英里 "面状全方向クローラ移動機構 第6報:自立走行試験および走行面への荷重分散についての計測"
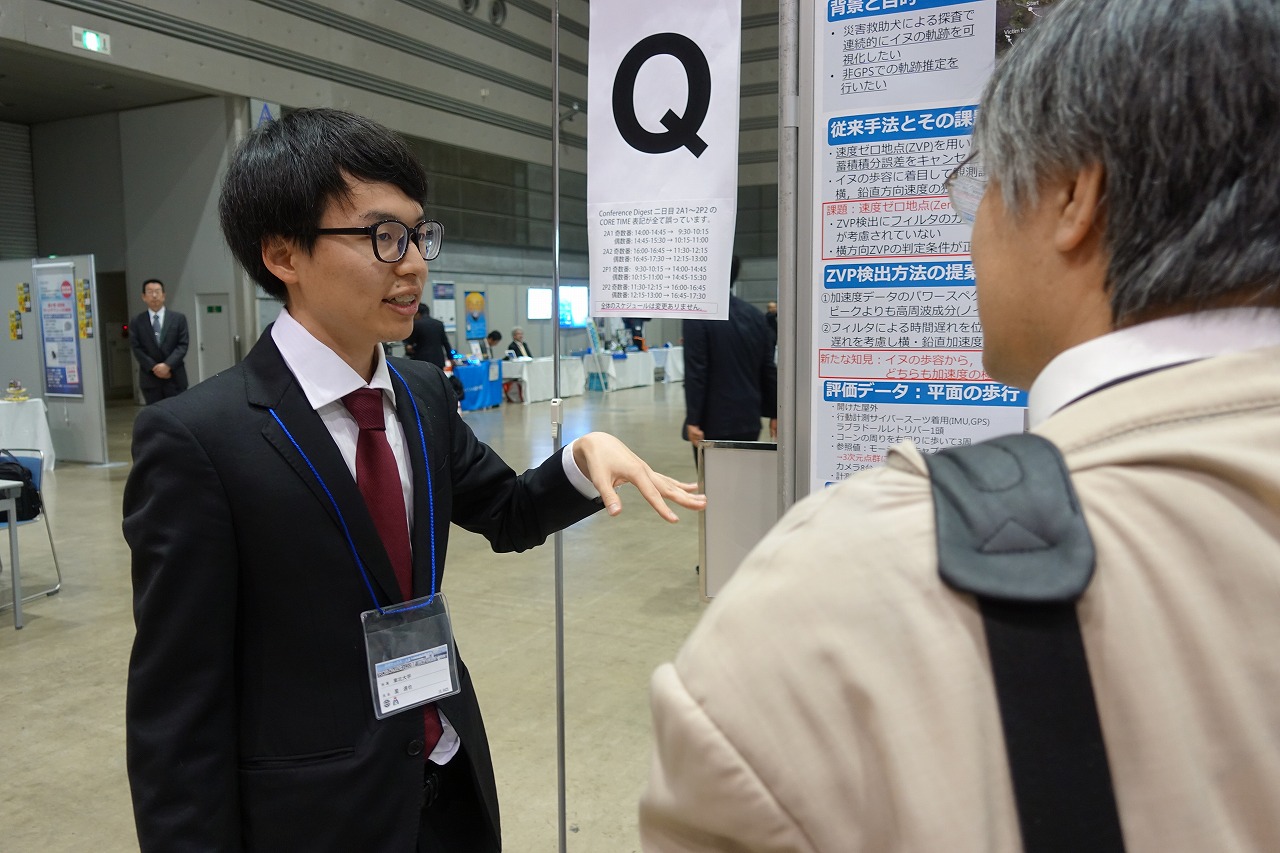
星達也 "イヌの移動軌跡推定のための歩容とIMUを用いた速度推定"
石井昭裕 "空気浮上型索状ロボットの噴射方向の二軸能動化手法の提案"
山口峻平 "光を利用したイヌの行動誘導方法の検討"
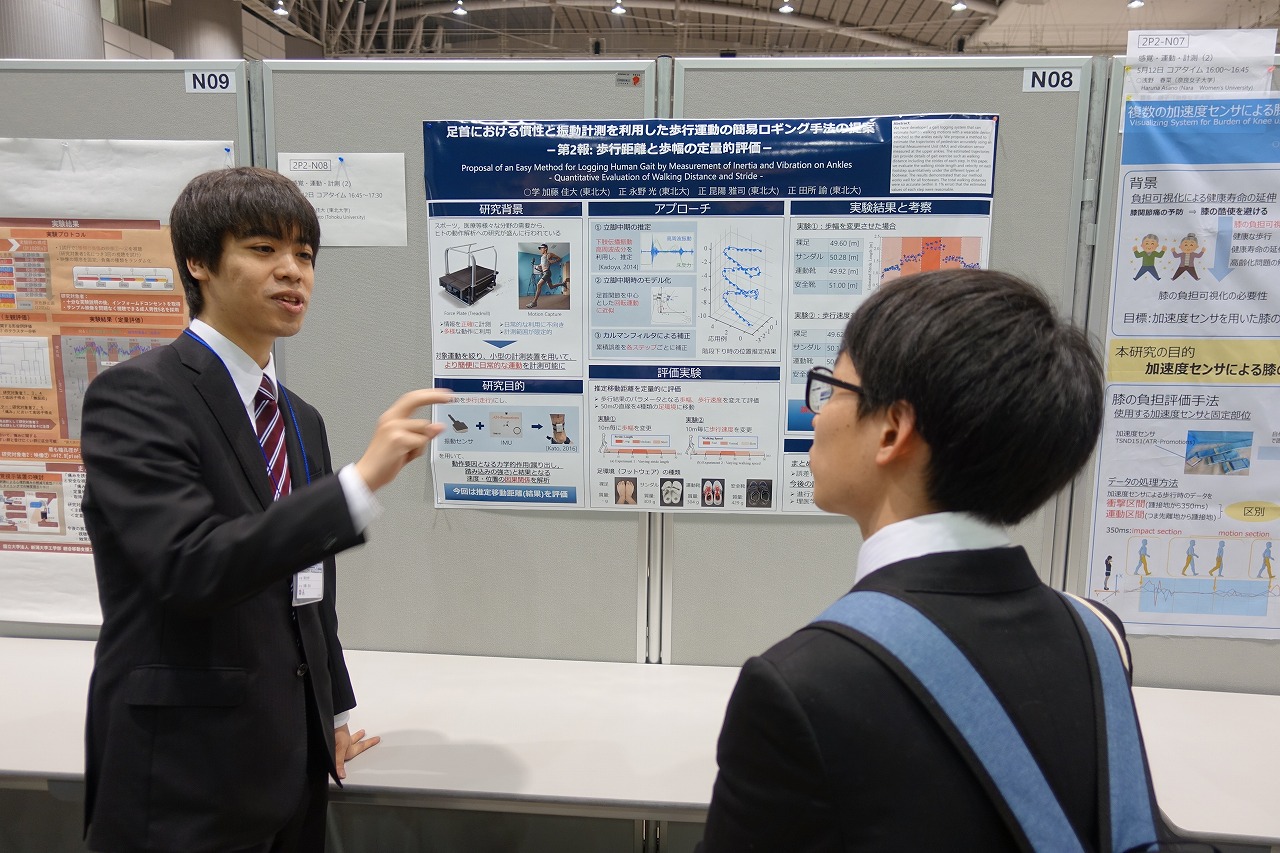
加藤佳大 "足首のおける慣性と振動計測を利用した歩行運動の簡易ロギング手法の提案 第2 報: 歩行距離と歩幅の定量的評価"
Gu "Investigation of Collision Vibrations Depending on Attack Speed for Realistic Haptic Rendering"
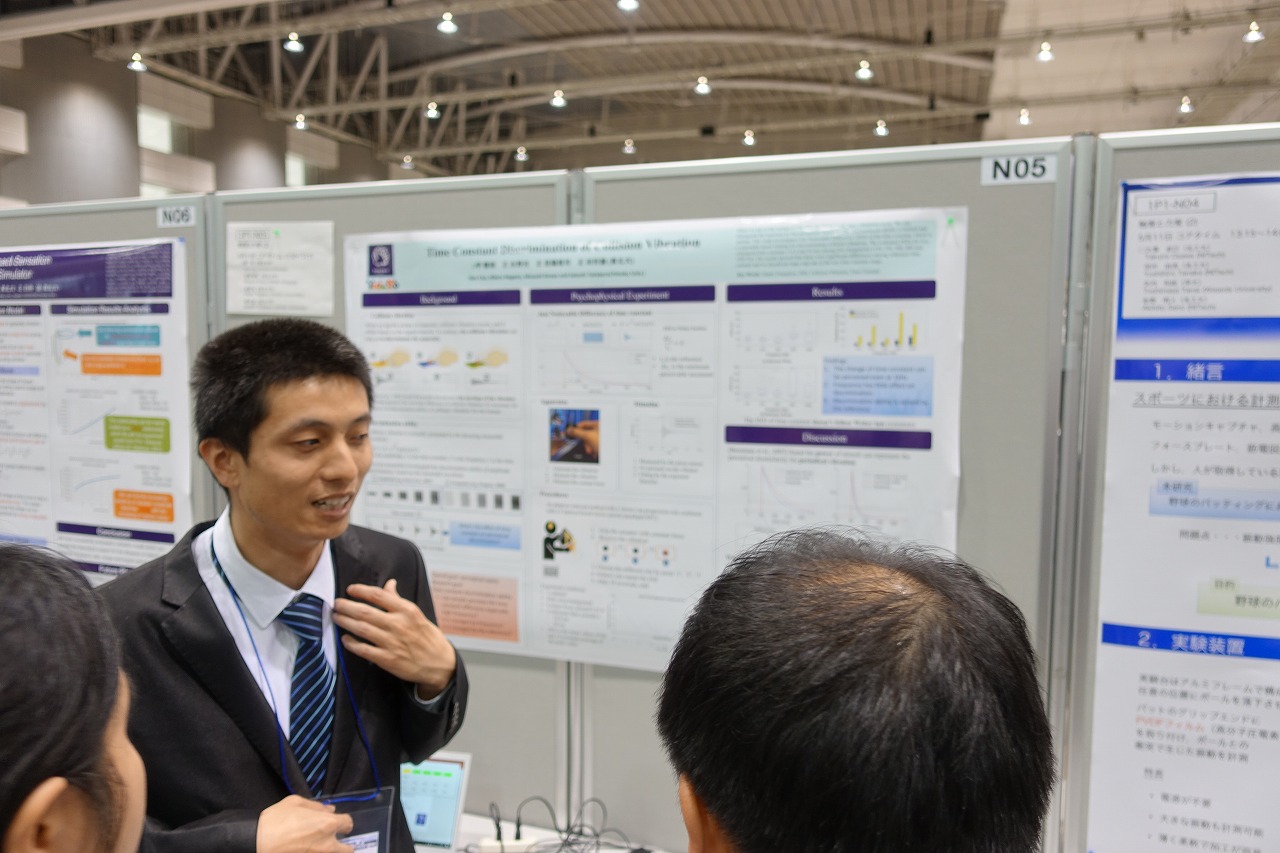
Cao "Time Constant Discrimination of Collision Vibration"
Daniel "Two-Handed Vibrotactile Feedback for Experiencing Camera Motion in 360-degree First-Person View Videos"
Dennis "Stable Haptic Feedback Generation during Mid air Interactions using Hidden Markov Model based Motion Synthesis"