研究内容・全方向 把 持 機構
全方向反射湾曲機構
構造に対して小さい対象物は表面のなじみで側面把持をし、大きな対象物に対しては湾曲動作により把持をする「腕・手連続メカニズム(図1)」を考案した。
このメカニズムは、災害現場で道を阻む瓦礫の除去や、被災者の救出に役立つ。また、素早く対象物を把持することで,把持機構にとどまらず、瓦礫の一部を体の支持に用いるブラキエーションの様式で移動する移動機構にも利用可能である。
本考案メカニズムの湾曲動作に,「全方向反射湾曲機構(図2)」を研究開発した。この機構は、対象物が接触した方向に反射的に姿勢を変化させる完全機械式のホロノミックな湾曲機構である。
空気圧を用いた「接触感応式連動バルブ(図3)」を基本原理とした試作機をこれまでに具現化した。これは複数の伸縮体を円周上に配置し、対象物が接触した位置と対角上にある伸縮体の内圧を高め伸長させることにより、接触方向に構造を湾曲させる。
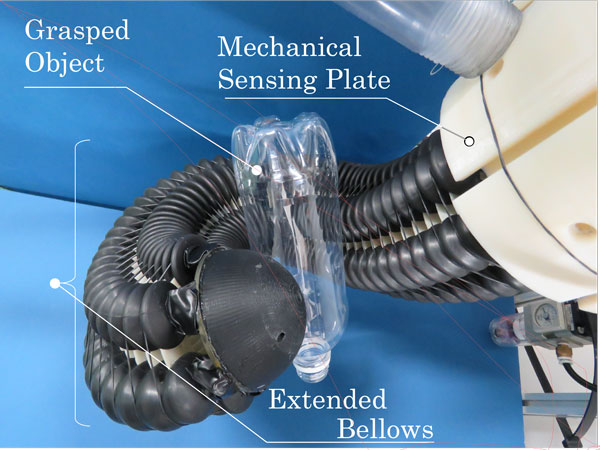
実際に具現化した試作機での接触方向への物体把持を図4に示す。