多田隈研究室
Home
(current)
研究室概要
研究内容
研究業績
アクセス
お問い合わせ
-->
Home
研究内容
把持機構
研究内容
目次
全方向移動機構
全方向駆動機構
把
(
は
持
じ
)
機構
アクチュエータの基本機構
可食ロボティクス
細胞シート用ヘラ機構
その他
把
(
は
持
じ
)
機構
全方向包込み式グリッパ機構
くわしく
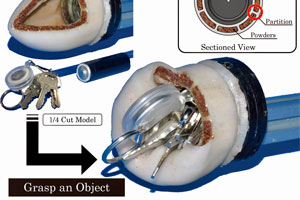
ジャミング膜グリッパ機構
くわしく
全方向反射湾曲機構
くわしく
一自由度変形グリッパ機構
線状柔軟物の被伸展グラスピングを可能とする多段式把持機構
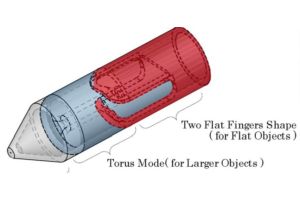
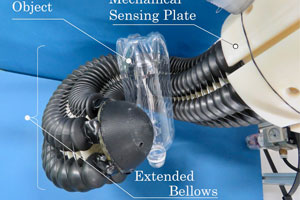
無摺動式トーラス型伸展指機構
生物外骨格構造・動作を活用したグリッパ機構
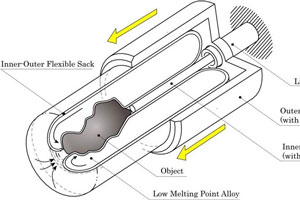
1次元柔剛切替メカニズムを活用したトーラスグリッパ機構
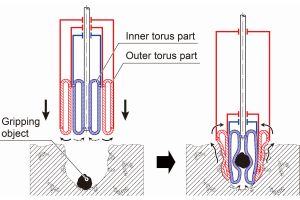
2層トーラス型グリッパ機構