Investigation of Infrastructure Damage by Using Micro Aerial Vehicle
Micro Aerial Vehicle (MAV) enables us to investigate places where are difficult for human to search, such as damaged building and plumbing in industrial plant. We have researched battery powered multi copters, which are one type of MAV. Typical issues of MAV are difficulty of manual operation and shortness of flight time (up to 10-15 minutes). To solve these problems, we have researched sensor-based position estimation and trajectory following, and adhesion mechanism for MAV.
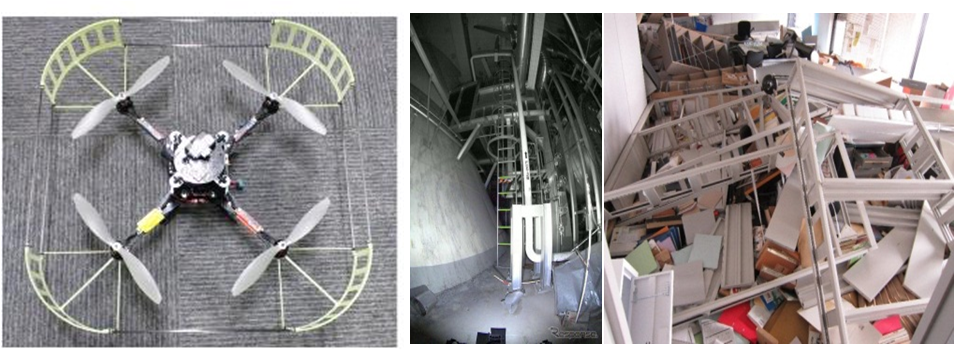
Investigation of Plumbing by Using MAV
|
|
We have researched a method that enables MAV to fly apart from plumbing at fixed distance based on position estimation. During investigation of the plumbing, operators need skill to fly MAV at fixed distance. It requires heavy workload to the operator. We have developed an MAV's autonomy which can reduce the workload of the operators during the investigation of the plumbing. |

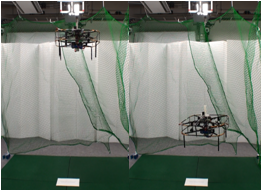
Adhesion of MAV to Ceiling or Wall
|
|
We have researched MAV which has an adhesion mechanism. The battery life of a MAV is generally limited up to 10-15 minutes because of the tradeoff between the capacity and the weight of the battery. To solve this problem, we have proposed a MAV which has an adhesion mechanism. The MAV can adhere to ceiling or wall and keep its position, so its exploration time can be extended. |