Next Generation Vehicles and Autonomous Mobile Robots
Measurement and Environment Recognition
 |
3-D Measurement Using Laser Scanner |
|
Three-dimensional shapes are measured by using a laser scanner to recognize environment around robots. However, the laser scanner cannot measure three-dimensional shape exactly in fog environment like inside of reactor buildings. We have researched techniques of exact three-dimensional measurement which is not affected by fog. |
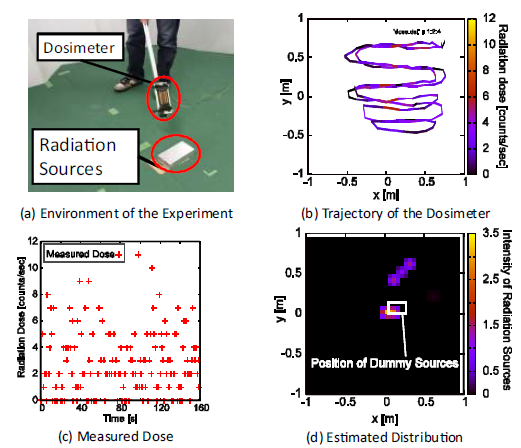 |
Radiation Measurement |
| By the accident of Fukushima Daiichi Nuclear Power Plant, high radiological substance spread widely over the places. After the diffusion, rain gathers it into several places such as gutters of resident. We must discover radioactive source in resolution of 10cm to 50cm to make decontamination efficient. We have researched to make high density radiation source maps from the 3-D ground shape and sparse radiation measurement by using stochastic approaches. |
Motion Planning
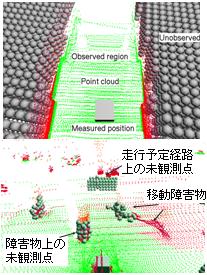 |
Detection of Unobserved Area and Avoiding Obstacles |
|
In real world, robots need to plan its motions to avoid collision with obstacles in unobserved areas. We have researched a method of motion planning to travel safely and quickly without collision in dynamic environment. We realized safety traveling of the robot with estimating indeterminate dangers by recognizing not only obstacles but also the blind area of sensors and unobserved area. The proposed method planed the motions which reveal unobserved area, and run quickly without collision. |
Position Estimation
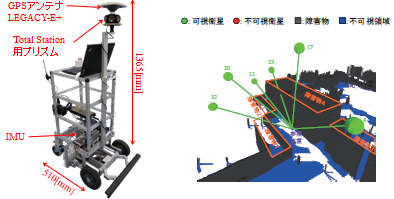 |
Improvement of GPS Based Position Estimation By Using 3-D Map |
|
GPS is the system which can measure one's position exactly on earth, and is used for car navigation and outside autonomous navigation. However, its measurement error becomes large in the place with many buildings because of the reflection of radio wave. We have researched a novel method of GPS based position measurement which can improve the accuracy and the robustness near buildings. Reflection of the radio wave was detected by using 3-D map and the GPS antenna position. Accurate position is estimated by using GPS radio waves without the reflection. Particle filter was used for the estimation of GPS antenna position. |